インターベンショナル ペイン メディスン手順での超音波の使用には、多くの利点があります。 超音波技術は、改善されたリアルタイムの高解像度超音波イメージングの多くの利点により、現在指数関数的に成長しており、疼痛管理介入を成功させています。 さらに、介入的疼痛管理手順に超音波を使用すると、患者と開業医の両方に対する放射線被ばくに関連する多くのリスクが回避されます。 適切なトレーニングと経験があれば、効果的かつ安全な鎮痛薬の介入に不可欠な、導入された針のシャフトと先端の確実かつ強迫的な追跡を習得することができます。 針の前進中に針、特に針の先端を視覚化できないことは、超音波ガイド下インターベンション手技 (UGIP) で最も一般的なエラーの 40 つです。 疼痛管理介入中の針の位置の操作、局所麻酔薬/ステロイドまたは他の薬の注射、高周波または凍結アブレーション手順、および適切な針先の視覚化なしのその他の介入は、多くの場合、意図しない血管、神経、および内臓の損傷を引き起こす可能性があります。 一例として、末梢神経ブロック配置中の意図しない血管穿刺損傷の割合は、従来の解剖学的ランドマーク技術の 10% から、超音波下で前進する局所ブロック針のリアルタイム視覚化の導入により XNUMX% に減少しました。 研修生はしばしばエラーを繰り返し、超音波ガイド下インターベンショナル神経ブロック留置手順中に技術的および安全性を損なう可能性のある行動を示す可能性があります。 施術者は、複数の金属針のさまざまな特性とサイズに基づいて、インターベンション/処置針が常に明確に識別されるとは想定できません。 使用されるさまざまな種類の針によって、超音波画像の下に明確な信号または「エコー」が生成されることがよくあります。 皮膚の下に導入された処置針の効果的な視覚化は、いくつかの理由で困難です: 針のエコー原性の変動、多くの超音波メーカーによる超音波マシンの画像処理技術の変化、およびトランスデューサープローブの特性の変動。 これらの理由と他の要因を操作および変更して、針の視認性を向上させることができます。これについては、このコースで説明します。
1. トレーニングとファントム シミュレーション
適切なメンターシップによるトレーニング
人間の解剖学に関する十分な知識と、超音波検査中に「典型的な」断面解剖学的画像を生成する能力は、通常、すべての状況で針を適切に視覚化するのに十分ではありません。 超音波ガイダンスの下で、針の配置と進行を他のいくつかの手順操作とともにリアルタイムで観察する能力は、新しいスキルセットが必要なため、経験豊富な開業医と初心者の両方にとって困難な作業になる可能性があります。 サイト等。 非放射線科医による超音波使用のための単純なトレーニング戦略を定義する他の傾向にもかかわらず[2]、デバイス操作と同時の針操作には専用のトレーニングが必要であることを示しています[3、8]。 米国地域麻酔・疼痛医学会および欧州地域麻酔・疼痛療法合同委員会は、局所麻酔薬注射に伴う針通過の視覚化は、デバイス操作の理解を含むUGIPの習熟に必要なスキルの9つの重要なカテゴリーのXNUMXつであると示唆しました。 、画像の最適化、および画像の解釈 [XNUMX] (図1).
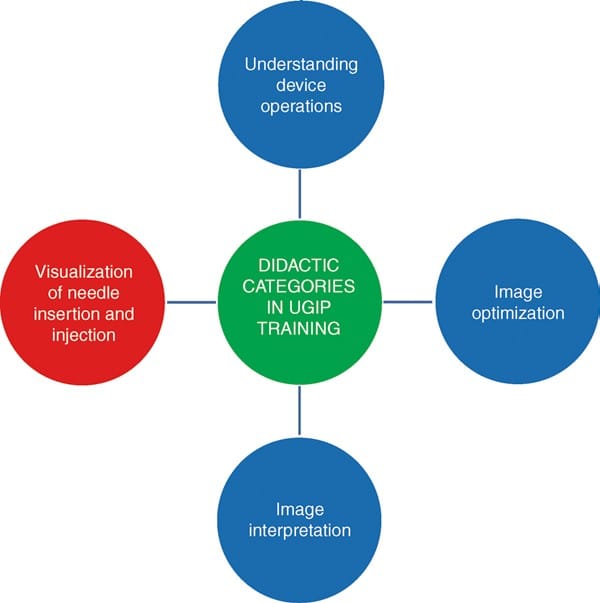
図 1 UGIP トレーニングの主要な教訓的カテゴリには、画像の最適化と解釈に加えて、針の挿入と局所麻酔薬の注入の視覚化、デバイス操作の理解が含まれます。 UGIP 超音波ガイド下インターベンショナル プロシージャ。
これらの 9 つの技術的スキルに習熟するためには、指導者の監督と指導の下での継続的な医学教育レジメンを含む適切なトレーニングを受ける必要があります。 UGIP に習熟するために必要なスキルセットを継続して開発するには、患者に対して UGIP を実行する前に、自分自身と同僚に対して超音波スキャンを実行し、シミュレーターとファントムで練習する必要があります [XNUMX]。
ファントム
UGIP トレーニング中の XNUMX つの一般的なエラーが特定されており、それらは次のとおりです。
1. 標的に向かって前進する際の処置用針の視覚化の失敗、および
2. 適切な針の視覚化なしの超音波プローブの動き [3]。
超音波ファントムは、典型的な針の外観と超音波下での感触に加えて、人間の皮膚の触覚テクスチャーと圧縮性など、人間の組織のいくつかの特性を模倣するシミュレーション ツールです。 UGIP ファントム シミュレーションは、針の操作スキルを向上させることで、患者の安全に関する重要な懸念事項にも対処し、患者の UGIP の実践に関連する多くのストレッサーを軽減する針先の視覚化機能をさらに開発する可能性があります。 ファントム シミュレーターで超音波ガイドによる針先の視覚化を実践することで、ストレスが少なくリスクの低い環境で UGIP に必要なスキル セットの開発が促進されます [10]。
超音波用の練習用ファントムの「組織のような」外観を実現するために、さまざまなモダリティが説明されています。 ファントムは通常、ファントムが解剖学的組織の正確なテクスチャをどれだけ正確に再現できるかを表す「忠実度」によって識別されます。 たとえば、忠実度の高いファントムは死体標本であり、忠実度の低いファントムは水浴で表されます [11]。 低忠実度のファントムは、水風船や水浴など、さまざまな素材から作られています (図2)、 豆腐 (図3)、ゼラチンまたは寒天、または外科用ゲルパッド(図4)。 スポンジ、チーズ、ニワトリ、七面鳥、ブタのファントム、およびその他のオブジェクトを含む他のシミュレーターが記述されています [5、11–14]。 これらの戦略は、新しい高忠実度ファントム技術の継続的な開発に対する関心の高まりを反映しています。
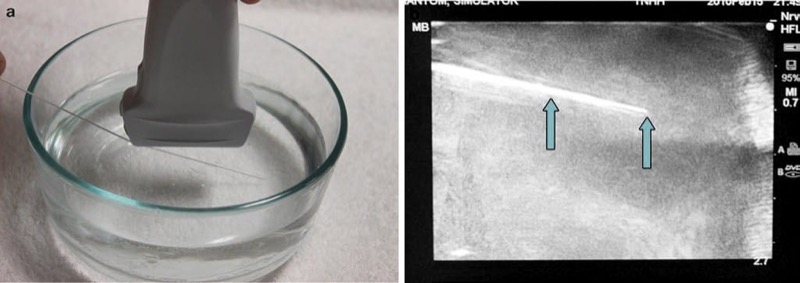
図 2 ウォーターバスファントムの針の外観 (a, b)。 これは水浴ファントム (a) です。 針 (矢印) は簡単に視覚化できます (b)。
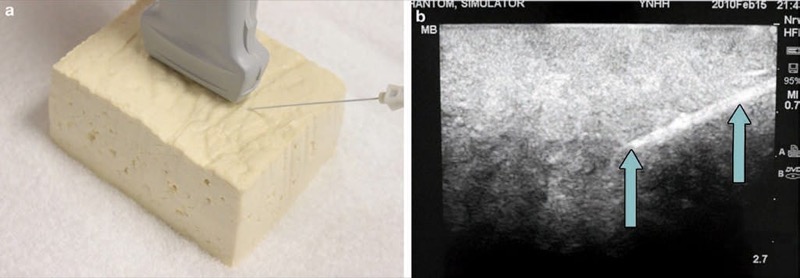
図3 豆腐ファントムの針の様子(a, b)。 Tofu は安価な超音波ファントムCaption(a) であり、針 (矢印) が容易に可視化されます (b)。
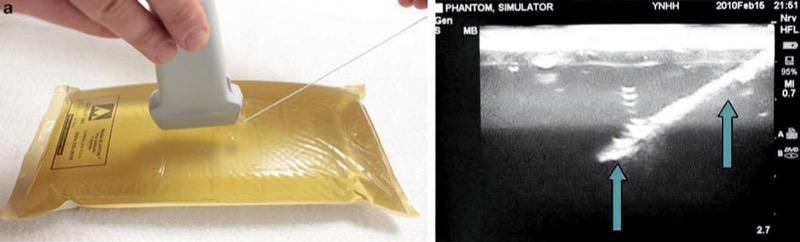
図 4 サージカルゲルパッドの針の外観 (a、b)。 これは手術用ゲルパッドファントム (a) です。 ここで、針 (矢印) は簡単に視覚化できます (b)。
忠実度の低いファントムは耐久性が限られており、超音波検査の忠実度にも限界がある可能性があります。 最近では、ファントム シミュレーション技術が向上し、ファントムはポリマー プラスチック、ポリウレタン、およびその他のビニール材料で作成できるようになりました。 別の例として、ブルー ファントム (図5) (ワシントン州レドモンド) および ATS 研究所のファントム (コネチカット州ブリッジポート) (図6)超音波画像では「組織のように」見え、血管も含まれる場合がありますが、幻神経や脊椎が含まれる場合もあります(図7) [10, 15]。
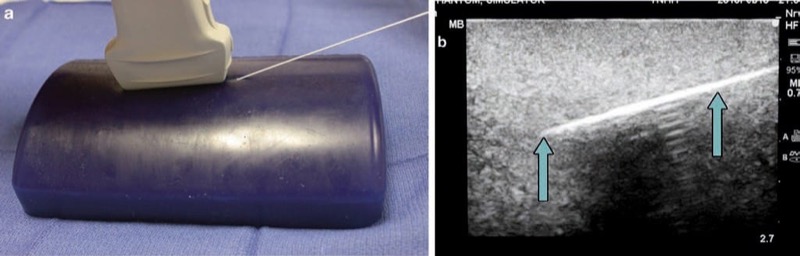
図 5 Blue Phantom の針の外観 (a、b)。 Blue Phantom は、神経と血管をシミュレートする構造を含む超音波ファントムです (a)。 ここで、針 (矢印) は簡単に視覚化できます (b)。
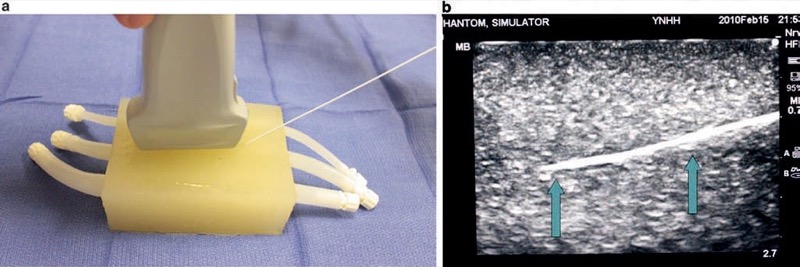
図 6 ATS 研究所のファントムにおける針の外観 (a、b)。 ATS ファントムには、容器をシミュレートするプラスチック チューブが組み込まれています (a)。 針 (矢印) は簡単に視覚化できます (b)。
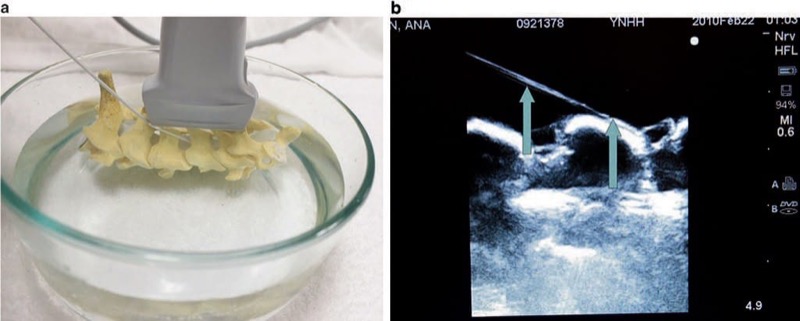
図 7 頸椎水浴ファントムシミュレーターにおける針の外観 (a、b)。 水浴頸椎および腰椎ファントムは、脊椎の骨構造をシミュレートします。 パネル (a) は、水浴中の頸椎モデルを示しています。 パネル (b) は、超音波下での頸椎と針 (矢印) を簡単に可視化したものです。
2. 忠実度の高いシミュレーション
超音波ガイド下地域 麻酔 新しいタイプの超音波シミュレータであるシミュレーション ファントム (U-GRASP) インタラクティブ ツール (IT) は、針の視覚化技術を習得する研修生のために著者によって開発されました (図8)。 U-GRASP IT には、超音波誘導ターゲットに到達し、神経刺激が成功したときに四肢の動きを模倣できる正しいファントムが含まれています。 さらに、ファントムは、ブロックが成功したときに、起動ブザーと発光ダイオードの形でフィードバックを提供します。 シミュレーターファントムの将来は拡大し続け、ターゲットを絞った針の進歩にエラーとスキルの評価が含まれる可能性があります。データは、UGIP の結果の改善に重点を置いて UGIP トレーニングのスコア付けと追跡にも使用される可能性があります。 最近、手術トレーニングで使用されているものと同様の仮想および 3D/4D UGIP ファントムが開発されています [16–20]。

図 8 超音波ガイド下局所麻酔シミュレーション ファントム (U-GRASP) インタラクティブ ツール (IT)。 これは、シミュレートされた手順中の針の位置決めにおける訓練生のパフォーマンスの文書化を可能にする忠実度の高い超音波シミュレータです。 さらに、対象となる解剖学的構造に針の先端が近づくと作動する光と音のインジケーターを介して、訓練生に即時のフィードバックを提供します。
UGIP 用の超音波装置の中には、UGIP の学習を容易にするマルチメディア ツールを提供するものがあります。 このデバイスにより、典型的な手順のプリセット画像とビデオ、および選択した手順中に利用できる解剖学的断面のバンクの使用が可能になり、リアルタイムの手持ちの高品質の参照と画像解釈のサポートが提供されます (図9).

図9 リアルタイム・読影支援システム(eZONO)。 eZONO デバイスを使用すると、オペレーターは保存されたプリセット画像とビデオのバンクを使用でき、選択した手順中に使用できる解剖学的断面を使用して、リアルタイムで手持ちの高品質の参照と画像解釈のサポートを提供できます。 eZONOの許可を得て使用しています。
3. 超音波と蛍光透視ファントムシミュレーターの組み合わせ
多くの疼痛専門医は UGIP に不慣れであり、超音波針の視覚化および超音波下での針操作について経験がないかほとんど理解していません。 これらの個人は、X 線ベースの技術と超音波シミュレーターの同時シミュレーションによって、さまざまな種類の注射 (頸椎や腰椎など) に必要な針追跡スキルの習得と実践を行った可能性が高いです。 この組み合わせは、腰痛のためのコンピュータ断層撮影支援注射から現在開発中のUGIP領域への移行に役立つことがわかった[21]。 ただし、高忠実度の解剖学的および動物実験室の超音波ファントムは現在、大学のセンターまたは特別な会議やセミナーで最も頻繁に見られ、広くアクセスできるわけではありません。 著者らは、頸椎経孔注射用の超音波と透視を組み合わせたファントムのプロトタイプを開発しました。 これは、人間の組織を超音波検査でシミュレートするポリビニル媒体に沈められた市販の頸椎解剖モデルから作られています。 さらに、このファントムには解剖学的検査が含まれており、誤って注入された場合、透視検査用色素を取り込みます (図10)。 再現が容易なこの忠実度の高いシミュレーション システムは、超音波ガイドと透視 UGIP を組み合わせた際の針の可視化における研修生の習熟度を向上させる可能性があります。

図 10 頸椎経孔注射用の超音波と透視ファントムの組み合わせ。 このファントムには、解剖学的に正しい液体で満たされた椎骨動脈が含まれており、超音波ドップラー検査で脈動した流れを示し、処置針から誤って注入された場合、蛍光色素を取り込みます。 写真は、常駐医師が使用するファントムを示しています。
手術、救急医療、インターベンショナル ラジオロジー、および麻酔学に UGIP 中の針の局在化のシミュレーションを導入すると、技術的スキルと「実践的」スキルの両方の向上に役立つことが証明された一連のエビデンスが増えています [2–9、22–24 ]。 技術的に高度なシミュレーターの有用性と費用対効果を確立するために、今後の研究では、忠実度の高いモデルと忠実度の低いモデルを比較する必要があります [25]。 さらに、手先の器用さを改善する上でのシミュレーションの利点を示した他の多くの医療専門分野があり、これは処置の結果の改善につながる可能性があります。 疼痛医学の分野は急速に進歩しており、シミュレーションを疼痛医学の教育とトレーニングに組み込むことで確実に利益が得られます。これは、UGIP 中の針の視覚化の課題のいくつかを克服するための高収率の戦略も提供する可能性があります。
4. 処置針: 関連する視認性要因
基本的な超音波検査と針画像の解釈
超音波装置の重要なコンポーネントの 3 つは、超音波トランスデューサー (プローブまたはスキャン ヘッドと呼ばれます) です。 この超音波プローブは、超音波トランスデューサの表面の下にある小さな圧電結晶に印加される交流電場によって生成される音響ビームで最高潮に達する音波を送信します。 UGIP で使用される典型的な音波周波数は、15 ~ 26 MHz の範囲内の「超」高周波数であるため、超音波の用語 [27、26] です。 超音波ビームは、トランスデューサのフットプリントから離れた方向に向けられ、組織の組成に応じてさまざまな程度まで組織を貫通することができます。 音響ビームは、特定の組織の密度に応じてさまざまな程度で筋肉、腱、およびその他の軟部組織を透過できますが、音波は骨などの非常に密度の高い組織を透過できません。 組織に到達し、組織を通過して生成された音波は、超音波トランスデューサに (さまざまな程度で) 反射されます。 したがって、超音波探触子から送信された音響ビームが超音波トランスデューサに反射して戻ると、超音波画像が得られます。 超音波プローブは、超音波ビームの発生器として機能するだけでなく、「エコー」の受信機としても機能し、データをコンソールとディスプレイ画面に中継して画像を形成します。 UGIP インターベンションが実行されると、挿入された処置針が音波を反射して超音波プローブに戻り、超音波プローブがトランスデューサの圧電結晶を変形させて電気パルスまたは「エコー」を生成します。 超音波音響ビームが超音波探触子に戻るのにかかる時間は、ビームが反射される深度に比例します。 この関係は「パルスエコー原理」と呼ばれ、UGIP のリアルタイム視覚化の基礎として機能します。 超音波検査の基本的な物理原理を理解することで、開業医は UGIP 中の適切な針の視覚化を継続して改善することができ、安全で効果的な UGIP 介入の実施にとって依然として重要です [27、XNUMX]。
5. 処置針の視覚化の基礎としての音響インピーダンス
UGIP における針の可視化のもう 1500 つの重要な側面は、音響インピーダンスなどの超音波画像の可視性を変更または変更する可能性がある要因を理解することです。 身体組織の音響インピーダンスは、組織の密度と、超音波ビームが特定の媒体を通過する速度に依存します。 超音波ビームが通過する特定の身体組織に応じて、音速は変化し、1600 から XNUMX m/s の範囲になります。 超音波ビーム速度のこれらの小さな変動は、信号強度または輝度の変動の原因となります。 たとえば、流体で満たされた容器に配置された処置針の一部は、各構造 (針と流体) の音響インピーダンスに大きな差があるため、明るい高エコー信号を生成します。 軟体組織と金属製の針または骨など、XNUMX つの異なる組織タイプ間で音響インピーダンスに著しい違いがある場合、針の超音波信号はより明るくなり、より高エコーになります。 針と軟部組織の間のこの音響インピーダンスの違いは、針の視覚化を改善するための追加の基礎を提供します。
6. 処置針のサイズ (ゲージ) とそのエコー原性
XNUMX つの重要な理由から、より大きな口径の処置針は通常、より小さなサイズの直径の針よりも超音波下でより簡単に視覚化できます。 まず、大きなゲージ (G) 針は表面積が大きいため、小さな G 針よりも音響インピーダンスの変化が大きく、超音波画面上でより明るい画像に変換できます。 第二に、より大きな G プロシージャ針のより大きな表面積は、超音波ビームを遮ることができ、その後、超音波ビームがトランスデューサに反射される可能性が高くなり、したがって、より小さな G 針よりも明るい信号を生成します (図11)。 その結果、UGIP 中の針の視認性を向上させるために、疼痛管理手順に適したより大きなゲージの針が推奨されています [28]。 ただし、G 手術針が大きいほど、針が組織を通過する際の患者の不快感が大きくなる可能性があることを覚えておく必要があります。 カンポスらによって行われた試験中ですが。 慢性的な鼠径部の痛みを治療するために、14 G 針と冷凍アブレーション プローブが使用され、超音波下での針の視認性を向上させる生殖大腿神経に向かって進められました。 手順針 G と針の長さ (章の後半で説明) の適切な選択は、UGIP タスクに基づいて選択する必要があります。大きな G 針が必ずしも患者の安全性を損なうとは限らないことに注意することが重要です。 一例として、29 および 21 G 針の安全性は、超音波ガイド下の脾臓生検研究で同じであることが判明しました [18]。
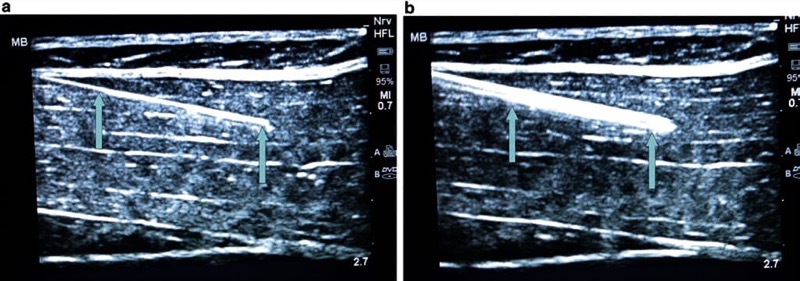
図 11 針のゲージ (G) とその可視性 (a、b)。 針が大きいほど、超音波ビームの反射が大きくなり、針の視覚化が改善されます。 パネル (a) は 21 G 針 (矢印) を示し、パネル (b) には 18 G 針 (矢印) が示されています。 針のサイズを少し大きくするだけでも、より見やすくなります。 豚ファントム。
7. 選択した皮膚挿入部位と処置針通過角度
最初の皮膚貫通/挿入のために選択された手術針の角度と挿入部位は、超音波スクリーンでの針の視覚化を最適化する上で重要な役割を果たします。 超音波プローブのフットプリントに対する針の挿入部位と針の角度の選択が不十分であると、超音波画面での最適で明確で正確な針の視覚化が妨げられる場合があります。 行動トレーニングのこの側面は、Sites et al. によって特定された 3 つの品質を損なうパターンの XNUMX つです。 UGIP訓練生の行動中[XNUMX]。 処置針の挿入角度が超音波プローブのフットプリント表面に対して急すぎるか鋭すぎる場合、超音波ビームのより小さい部分または短い部分が針からトランスデューサに反射され、針の視認性が低下します (図12) [28]。 この障害を克服するために提案された簡単なアプローチは、超音波プローブのフットプリント表面/超音波ビーム方向に対してできるだけ多くの垂直な挿入角度で処置針を導入することです。 処置針の最適な超音波画像を取得するには、超音波ビームが針に近づき、垂直 (90°) の角度で超音波プローブに反射される必要があります。 超音波プローブ音響ビームと処置針が互いに 90° の角度にある場合、トランスデューサは針からの反射超音波ビームの受信を最大化します。 処置用針と超音波プローブを互いに 90° にできるだけ近づける別の方法は、「ヒールイン」操作を使用して超音波トランスデューサーの反対側の端を押すか傾けることです [31] (図13).
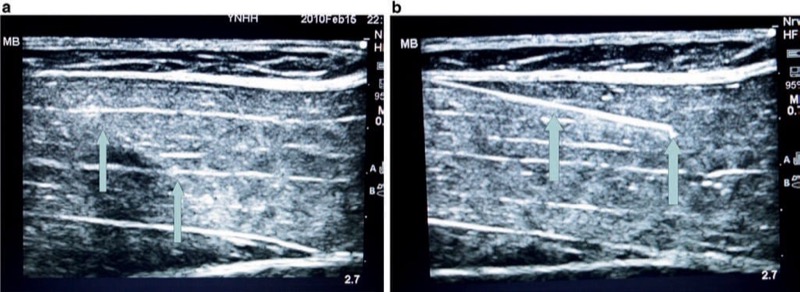
図 12 針の挿入角度とその視認性 (a、b)。 針の挿入角度が急であるほど、超音波ビームの反射が少なくなり、針の視覚化が悪化します。 パネル (a) は、より急な挿入角度を示していますが、パネル (b) は、より小さな角度で挿入された同じ針のより良い視認性を示しています。 豚ファントム。
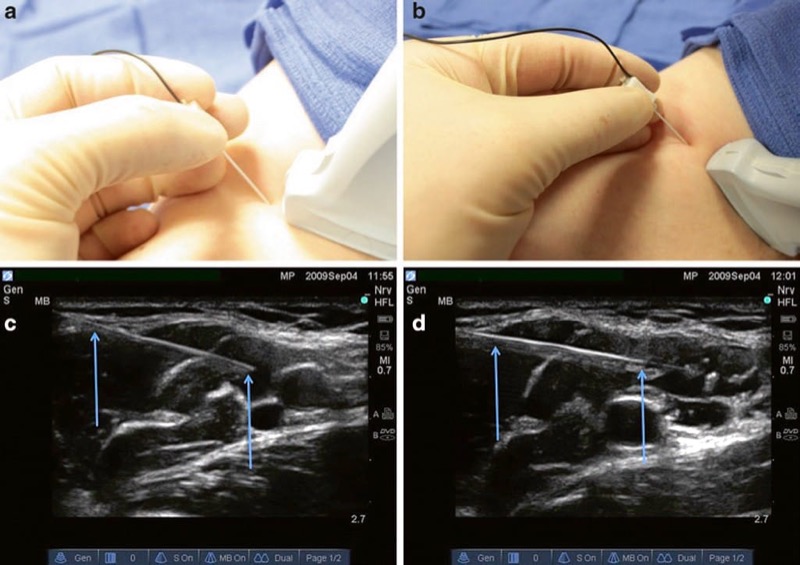
図 13 かかとを内側にプローブして角度を変更します (a、b)。 ヒールイン操作により、プローブから針への入射角が増加し、針の反射が改善され、視覚化が改善されます。 パネル (a) は、面内線形プローブ アプローチを示しています。 パネル (b) は、面内ヒールイン操作を示しています。 パネル (c) は、面内線形プローブ アプローチによる針 (矢印) の外観を示しています。 パネル (d) は、針の外観 (矢印) を実演し、機内ヒールを操作します。
多くの局所麻酔および UGIP 処置は、リニア アレイ超音波プローブを使用して実行されます。 しかしながら、リニアアレイプローブは、超音波プローブの方向に対して最適な処置針を得るために使用される傾斜またはヒールイン操作中に、患者にさらなる不快感を与える可能性がある。 このヒールイン操作に対する感度の増加は、特定の慢性疼痛患者に特に当てはまる可能性があり、これらの患者の不快感に対する潜在的な解決策は、曲線超音波プローブの使用です。 曲線プローブは、ほとんどすべての患者にとって比較的痛みのないヒールイン操作を可能にすると同時に、優れた処置針と超音波プローブの向きを取得し、組織と処置針の両方の視覚化を最大化します [32] (図14)。 ただし、曲線型超音波プローブ (より深い構造にはより理想的) は、リニア アレイ超音波トランスデューサのように、より表面的なターゲットに対して最適なスキャン画像を提供しないことを覚えておく必要があります。
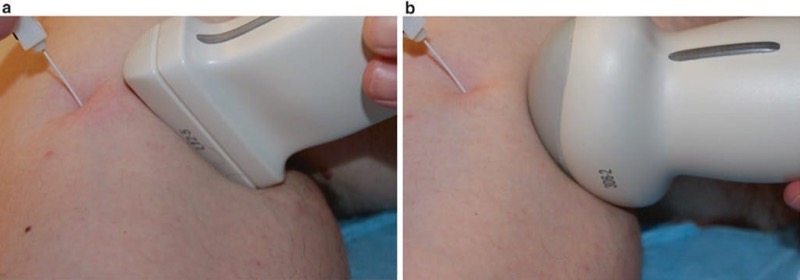
図 14 曲線プローブと直線プローブ (a、b)。 ヒールイン操作は、湾曲した超音波プローブにより人間工学的に改善され、患者の不快感を軽減するという追加の利点があります。 パネル (a) は、線形プローブを使用したヒールイン操作を示しています。 パネル (b) は、カーブしたプローブを使用したヒールイン操作を示しています。
皮膚表面界面に対する処置針の最適な角度は、30° から 45° の間の針挿入角度範囲の性能です [32]。 さまざまな臨床状況では、針を挿入するためのこの最適な角度のインターフェイスを得ることは現実的ではない可能性があるため、エコージェニック針は、これらの状況のいくつかを克服するように設計されています (針を挿入するためのより適切な角度を得ることができない)。 これらのエコー発生針は、処置針の特殊なエコー発生特性により、皮膚への挿入角度が 15 ~ 30° という低い角度または急な角度で視覚化できます [33]。
8.エコージェニック処置針
適切に画像化されると、ほとんどすべての処置針が超音波画像を生成したり、超音波スキャンでエコーを返したりします。 ただし、針は、超音波画像の品質を向上および最適化する超音波と組み合わせて使用する特別な特性を備えて設計および設計されており、エコージェニック処置針と呼ばれています。 最近の多くの進歩により、針技術に追加の特性がもたらされ、針のエコー源性が改善されました。 小さな角度のへこみまたはノッチが針シャフトに作成されているため、超音波の散乱が増加する処置針の表面が不規則になります。 理論的には、処置針の不規則または切り欠きのある表面は、皮膚への針の挿入角度が変化しても、より明るい信号とより鮮明な超音波画像を提供します (図15)。 処置針のシャフトに作成されたより多くのくぼみまたはノッチは、超音波画像画面での針の視覚化の改善につながる可能性があります[34]。 しかしながら、くぼみの数が増加するにつれて、処置針シャフトの粗さの程度が同時に増加し、これは針と組織の境界面でのより大きな摩擦に関連している可能性がある。 針と組織の界面での摩擦は、神経ブロック処置中に必要なスムーズな針の動きのプロセスを混乱させる可能性があり、不利であることが判明したり、患者にさらなる不快感を与えたりする可能性があります[35]。
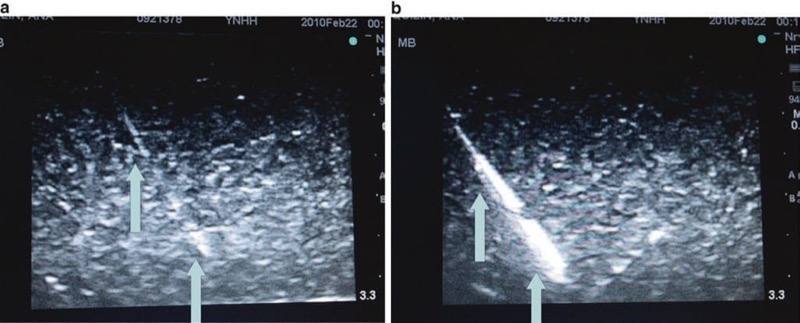
図 15 くぼみは超音波の反射を改善します (a、b)。 このエコージェニック針は、針のシャフトにくぼみがあり、より可変の挿入角度で超音波ビームの反射を改善します。 パネル (a) は、入射角が鋭角の一般的な非エコー源性針 (矢印) を示しています。 パネル (b) は、視認性が向上した鋭角の入射角にある溝付きエコー針 (矢印) を示しています (Pajunk、米国)。 ブルーファントム。
ポリマーで覆われた処置針は、針のエコー源性を改善するもう 36 つの技術的進歩です [XNUMX]。 発泡剤で処理された特殊なポリマー針コーティングは、針の挿入および通過中に針シャフト表面にマイクロバブルを作成します。 したがって、処置針が組織内および組織を通って前進すると、組織と針の境界面の間に音響インピーダンスが増加し、この手段によって針のエコー源性と超音波画像の品質が向上する可能性があります (図16)。 さらに、神経刺激および対象となる神経局在化処置中にポリマーコーティングされた針が使用される場合、処置針シャフトに適用されたポリマーコーティングは、電気刺激の絶縁体として機能し、処置針のシャフト周辺の組織への刺激を最小限に抑えます。 処置用針の設計 (くぼみとポリマーコーティング) における上記の技術的進歩の組み合わせにより、現在市場で入手可能な最新のエコー発生針の開発の基礎が作成されました (図17)。 UGIP の処置針の可視性を改善するために、現在開発中の他の技術革新があります。 これらの新しいアプローチの 35 つは、処置針の先端とは反対側の処置針の端に低周波発生器を取り付けることです [XNUMX]。 この発生器は、針のシャフトに沿って大きな振幅の振動を発生させ、超音波画像の下で処置針をより見やすくします。 これと他のいくつかの有望な針の設計開発の有効性は、現在調査中です。
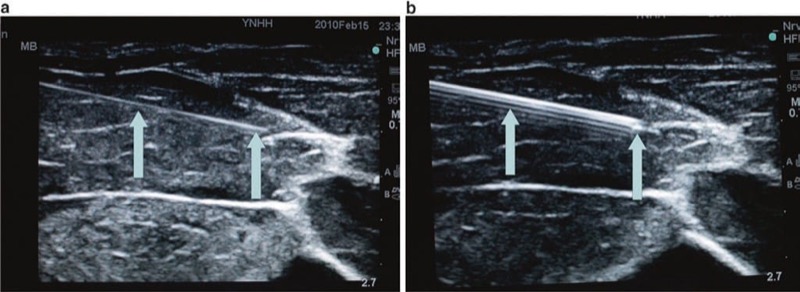
図 16 ポリマーコーティング針と非エコー発生針 (a、b)。 非エコー針と比較したポリマーコーティングされたエコー針。 パネル (a) は、21 G 非エコー針 (矢印) を示しています。 パネル (b) は、21 G ポリマーでコーティングされたエコー針 (矢印) を示しています。 豚ファントム。
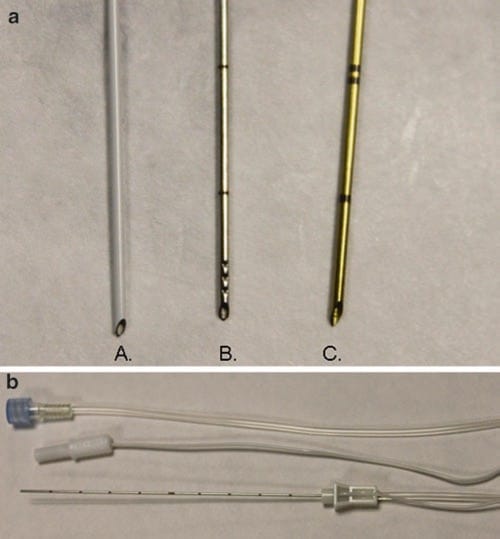
図 17 ポリマーで覆われたくぼみのある針 (a、b)。 これらは、ポリマーコーティングとシャフトのくぼみを組み合わせた神経刺激針のサンプルであり、針のエコー源性とその後の視覚化をさらに改善します。 パネル (a) A Braun、B Havels、C Pajunk 針。 パネル (b)、神経刺激特性 (B Braun) を備えたエコー発生針のサンプル。
Phelanらによる研究。 エコー源性針を標準的な非エコー源性針と比較しても、インターベンション手順の短軸アプローチ中の UGIP の測定可能な客観的なパフォーマンスの改善は得られませんでした [23]。 明るいエコー源性針の潜在的な欠点の 31 つは、超音波画像上で処置針からの望ましくない影やその他のアーティファクトが増加する可能性があることです [XNUMX]。 手順の針シャフトから作成されるアーティファクトを減らし、UGIP 中の針先の視覚化をさらに改善するために、新しい技術は、針シャフト全体ではなく針先の可視性を改善するための開発に焦点を当てています。
9. 処置針の先端
UGIP 針の先端を正確に視覚化することは、処置針によって生じる神経や組織の損傷に関連する意図しない血管損傷や注射、その他の合併症を最小限に抑えるか回避するために、最も重要かつ重要です。 サイト等。 は最近、UGIP 中の研修生の最も一般的なエラーが発生したことを示しましたが、レジデントは針を進め、超音波画面で針先の視覚化を維持していませんでした。 その他の一般的に実行されるエラーは、筋肉内注射中の不十分な針の視覚化と針先の識別でした。これは、UGIP 技術中の常駐行動の品質を損なう 3 つのパターンの XNUMX つとして識別されています [XNUMX]。
針の先端の面取りは、通常、針の先端の表面が針のシャフトに比べて不規則であるため、また近位の針のシャフトに比べて針の先端の角度が緩やかであるため、超音波ビームを散乱させます。 手術針のベベルアップ位置が超音波画像の針先の視覚化を改善し、溝付きシャフトエコージェニック針の開発を導入したという認識の二次的なものでした(Fig.18)。 他の追加の技術的進歩は、手順の針先の可視性と超音波画像の品質を改善するために開発されました。 ある研究[37]では、針の先端に配置された特別なトランスデューサー/レシーバーにより、針先の視覚化が大幅に改善されました。 針の先端に配置されたセンサーは、超音波を検出して電気信号に変換する圧電ポリマーでできており、超音波プローブの受信機に転送されて、手順の針の先端の位置決めの画質を向上させます。 残念なことに、このトランスデューサーとレシーバーの針先デザインのデバイスは、4 人の患者のうち 16 人で故障し、広く使用されていません。 ただし、開発された高度な圧電針設計の他の新しいプロトタイプがあります。 ある最近の研究では、カスタマイズされた 18 G 絶縁 Tuohy 針に圧電アクチュエータを配置することで、遠位針先端の視覚化が改善されました [38]。
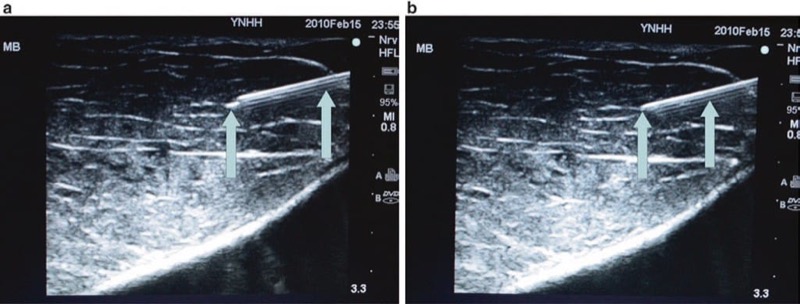
図 18 ベベルアップとベベルダウンまたは側面のベベル (a、b)。 超音波ビームがこの位置で最大に反射されるため、ベベルアップ位置は針先の視覚化を向上させます。 パネル (a) は、針がベベルアップ位置 (矢印) にあるときの明るい針先を示しています。 パネル (b) は、正確に同じ針を回転させて下向きの位置に傾斜させ、針の先端 (矢印) の悪化した視覚化を示しています。
また、針の先端のみにへこみや大きな凹凸を作り、処置針のシャフトを温存することで、エコー源性が著しく向上しました。 これらのノッチの処置針の先端への配置または組み込みは、上述のテクスチャ増大針技術の設計と同様の方法で作成される。 これらのノッチ付き先端処置針は、針シャフトの残りの部分から針先端のエコー原性を強調するように作用し、その結果、超音波画像下で針先端がより見えやすくなります(図19).

図 19 Echogenic 先端。 このHavelsエコージェニックチップニードルは、ニードルチップの溝を利用してニードルチップのエコージェニック性を向上させます。 パネル (a) は、遠位の針の先端に溝がある Hasvels 針を示しています。 パネル (b) は、超音波ファントム (矢印) 内の高エコー性の針先を示しています。 ブルーファントム。
優れた針先の画質設計と針シャフトの画像の視認性は、神経ブロックおよび UGIP 技術の理想的な処置針として考慮すべき要素です。 理想的な UGIP 針にとって最も重要なもう 39 つの要因は、その汎用性です。 UGIP針は、あらゆるタイプの組織に使用でき、どの角度からでも容易に視覚化でき、針の縁の鮮明な描写を維持し、シャドーイングなしでアーティファクト形成を低く抑え、良好な検出と周囲の組織や構造との識別を維持する品質を備えている必要があります。 [40]。 テストされた現在使用されているエコージェニック針の多くは、理想的なエコージェニック設計にはまだほど遠い. しかし、最近の技術の進歩により、現在のエコー発生針の設計と、局所麻酔およびUGIP処置中に使用される理想的なエコー発生針との間のギャップが急速に縮まっています[XNUMX]。
10. 超音波装置と処置針の視認性
超音波画像アーチファクトと処置針の視認性
針の可視性の超音波イメージングは、使用される処置針の特性だけでなく、超音波トランスデューサと超音波装置の両方の技術と機能にも依存します。 超音波検査中に得られる超音波プローブの画像解像度は、スキャンヘッドの圧電結晶密度、その結晶タイプ、およびトランスデューサの受信特性に依存します。 超音波画像の解像度は、超音波装置の画像プロセッサ [31、41] の能力にも依存します。 超音波トランスデューサと超音波画像プロセッサ技術の両方の進歩は、施術針の視覚化において開業医を支援し続けています。 ただし、開業医が針のイメージングとその解釈の経験から潜在的なアーティファクトの知識を得ることが不可欠です。
超音波装置による画像の取得と処理に関連する超音波アーチファクトは、さまざまな方法で組織構造と処置針の視認性を損なう可能性があります。 場合によっては、返ってくる超音波が劣化すると、高エコーのターゲットが低エコーまたは無響に見えることがあります。これは、音響ビームのミスアライメントの影響であり、異方性と呼ばれます。 異方性は、異常な反射および/または屈折(後述)の二次的なものである可能性があり、オペレーターの音響ビームの位置ずれとは無関係のままです。 処置針などの滑らかな表面からの反射は、鏡面反射と呼ばれます。 不規則な表面からの反射は、超音波ビームの分散を引き起こし、その後の受信超音波信号の劣化を引き起こす可能性があり、これは散乱と呼ばれます (図20)。 散乱は、画像の劣化やアーティファクトを引き起こす可能性があります。 ただし、散乱は、新しく開発されたエコージェニック手順の針で有利に使用される場合があります。 複数の表面が互いに超音波トランスデューサとの間で超音波音響ビームを反射する場合、それは残響と呼ばれます (図21)。 超音波が入射経路から逸れて、より深い構造から反射される場合、それは屈折と呼ばれます。 減衰は、超音波音響ビームの劣化を引き起こす可能性のあるもう XNUMX つの要因です。 減衰は、超音波信号が特定の種類の組織を通過する際の超音波信号強度または振幅の減少として説明され、反射、屈折、および散乱を含む上記の要因の多くによって引き起こされる可能性があります。 減衰、異常な反射、および屈折による影響の相加または歪みの影響により、表示される超音波画像が歪む可能性があり、処置針と周囲の解剖学的構造、および他の組織構造への針の近接の両方を正しく識別できなくなる可能性があります。
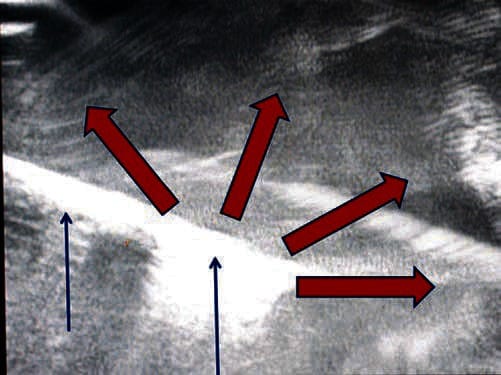
図 20 散乱は針の視認性を低下させます。 針の散乱により、針の視覚化が低下する可能性があります。 赤い矢印は超音波ビームの散乱を表し、アーティファクトを引き起こし、針 (青い矢印) の視覚化を悪化させる可能性があります。 ここで針は水浴に挿入されます。
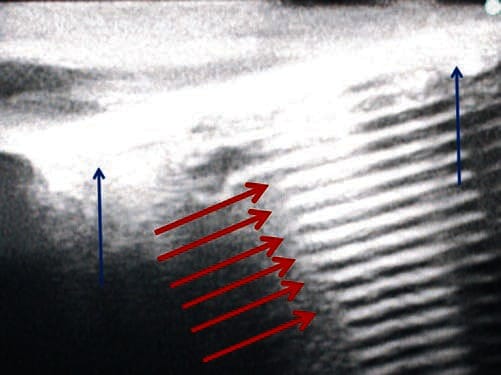
図 21 残響は針の視認性を低下させます。 残響は、下の構造物からの針の反射を引き起こし、針の視覚化を損なう可能性があります。 ここでは、針 (青い矢印) が手術用ゲル パッド ファントムに配置され、残響 (赤い矢印) と呼ばれる明確なアーティファクトがあります。 外科用ゲルファントム。
11. 処置針の視認性に対するさまざまな超音波検査モードの影響
音響ビーム ステアリングおよび可変周波数に続く複合空間および周波数画像再構成
処置針から反射された超音波信号によって生じる偏向の問題を克服するために一般的に使用されるソリューションは、複合空間イメージングの生成を可能にするビームステアリング超音波システムを使用することです。 ビームステアリング超音波システムは、本質的に、内部の超音波ビームの入射角を変更することにより、処置針から反射された音響ビームを超音波プローブに戻します (図22)。 古い超音波プローブは機械的なステアリングに限定されていますが、広帯域幅のトランスデューサを備えた最新の超音波検査機には、送信フォーカスを変更できる特定の機能があります。 広帯域幅のトランスデューサにより、超音波プローブは自動モードでさまざまな角度で超音波信号を生成および受信できるようになり、改善された超音波画像を生成できます [42]。
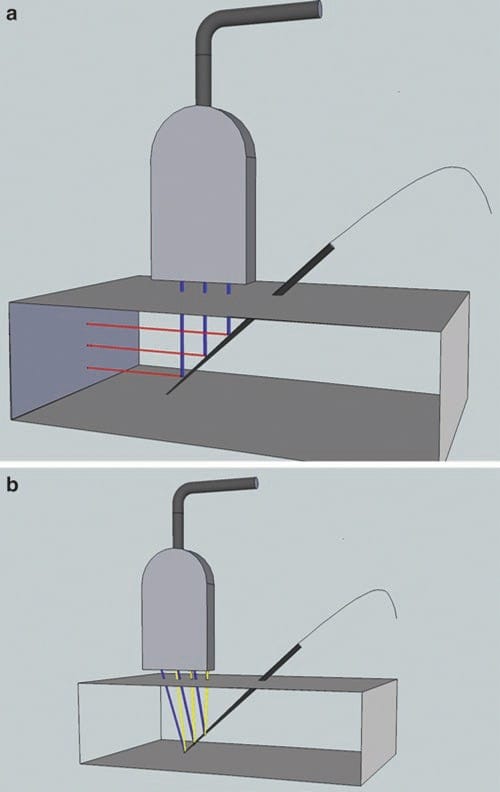
図 22 ビーム ステアリングにより、針の視認性が向上する場合があります。 ビーム ステアリングは、プローブと針の間の入射角を大きくして針の視認性を高めることで、針の視認性を向上させます。 パネル (a) では、ビームは針に向かって操縦されず、青色の超音波ビームが少なく反射され、赤色でトランスデューサに戻ります。 パネル (b) では、青色の超音波ビームが針に向かって操縦され、黄色で反射されます。
複合空間イメージングは、計算プロセスによって実現されます。 これは機械的なビーム ステアリングによって実行され、異なるステアリング角度から 43 つ以上のフレームを XNUMX つのフレームに結合します。 複合空間イメージングにより、明瞭性、解像度が向上し、処置針の輪郭定義が向上します [XNUMX]。
周波数複合ソノグラフィーは、複数の異なる周波数からスキャンを取得し、各フレームに可変スペックル アーティファクト パターンを生成します。 生成されたフレームは平均化され、従来のソノグラフィーで見られるスペックルや粒子の粗い外観が軽減されます。 この結果は、組織構造の解剖学的超音波画像の改善ですが、処置針の画像品質の向上ではありません [44]。
12. 超音波プローブの周波数 (深さ) 音響パワーとゲイン
UGIP で最も一般的に使用される超音波プローブは、5 ~ 10 MHz の周波数変換器です。 この特定の超音波スキャン ヘッド周波数は、深さ 1 ~ 5 cm の神経と神経叢に対して良好な空間分解能を提供することが知られています [45]。 より低い周波数、2 ~ 5 MHz の超音波プローブは、より深い神経および神経叢構造を視覚化するためによく使用されます。 ただし、解剖学的構造と処置針の両方の解像度は、深度が深くなり、低周波の超音波トランスデューサを使用すると、決定的ではなくなります。 最大 18 MHz のトランスデューサ周波数を備えた高周波超音波プローブは、手や前腕の神経などの最も表面的な構造への介入に最もよく使用されます [46]。 深さ、音響パワー、およびゲインを調整できる超音波デバイス コントロールにより、超音波ビームを最適なレベルに集束させ、改善された超音波画像を提供するオプションが可能になります。 しかし、超音波装置のこの調整の可能性は、超音波画像の通常の最適化以外では、処置針の可視性に限られた影響しか与えない可能性があります。
13. タイムゲイン補正と高調波イメージング
超音波装置のタイム ゲイン補正制御オプションを使用すると、さまざまな深さで画像の明るさを調整できます。 さらに、ゲイン補正で行われた変更と調整により、超音波音響ビームが皮膚や他の表層を通過するときに生成される超音波アーチファクトの多くを最小限に抑えることができます。 時間ゲイン補正制御オプションは、組織アーチファクトによって生成されるノイズを低減するだけでなく、処置針の最重要信号からのアーチファクトも低減できます。
最新の超音波装置のもう 47 つの機能は、ハーモニック イメージングです。 この機能は、反響や、皮膚や体壁の構造によって生成される他のいくつかのタイプのノイズ アーティファクトを抑制する機能を提供します。 高調波イメージング技術は、身体組織が微弱ではあるが使用可能な高調波信号を生成し、超音波ユニットによって検出および増幅できるという理解に基づいています。 高調波イメージング機能は、これらの検出された高調波信号を使用し、超音波画像を改善するために使用できる低周波高振幅ノイズを適用します [44]。 処置針の視覚化のハーモニック イメージングから得られるレポートは混合されており、優れた超音波イメージングから、ハーモニック イメージング機能のない従来の超音波装置と比較して劣ると見なされる処置針のイメージまでさまざまです [48、XNUMX]。 新しいタイプの高調波イメージングであるブロードバンド技術の影響を調査する必要があります。
14. 輝度、モーション、およびドップラー モード
従来の B モード (B は明るさを表す) は、現在使用されているグレースケール超音波装置モダリティとして機能し、通常は UGIP を実行するときに使用されます。 M モード (M スタンド オブ モーション) 超音波装置は、体内の構造の動きを評価するために使用されます。 通常、最新の超音波装置は、表示画面上の元の B モード画像の小さいバージョンに隣接して M モード画像を表示します。 2D 超音波装置を使用する場合、M モードは対象の構造に焦点を合わせ、その動きを経時的に波状の線の形で表示します。この線は、動く組織構造に応じて変更されます。 M モードは UGIP 中の使用が制限されており、処置針の視認性に影響を与えたり、改善したりしません。
最新の超音波装置に装備されている XNUMX 番目のイメージング モダリティは、ドップラー感度とパワー ドップラーで構成されるドップラー モードです。 ドップラーモード機能は、血管内の血流を他の同様に見える組織構造と区別することができ、血管を識別できるため、理論的には意図しない血管貫通や処置針による外傷を防ぐために利用できます (図23)。 ドップラー機能は、「強化」セクションで説明されている他の方法やツールと組み合わせて、処置針のイメージングの品質と明瞭度を向上させるためにも使用できます。
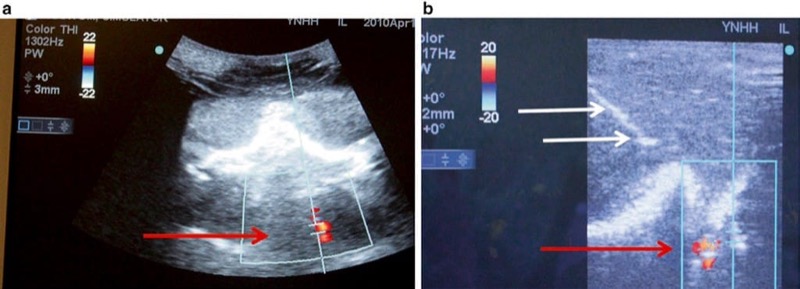
図 23 ドップラーは、不注意による血管への侵入や血管内注射の防止に役立つ可能性があります (a、b)。 ドップラーを使用すると、超音波ガイド下の処置を受ける際に避けるべき血管の視覚化に役立ちます。 パネル (a) は、腹臥位での頸椎 C7 のレベルでの椎骨動脈 (赤い矢印) のドップラーによる血流の検出を示しています。 パネル (b) は、側方位置でのドップラー超音波で前に識別された血管 (赤い矢印) を回避する針 (白い矢印) を示しています。 頸部経孔注射用の超音波および透視ファントムの組み合わせ
15. 3D および 4D 超音波イメージング
典型的な 2D 超音波イメージングは、3 つの平面でフラットな超音波画像をキャプチャして表示し、現在の蛍光透視法に類似または類似しています。 3D 超音波技術は、複数の平面でさまざまな角度から画像をキャプチャします。 得られた 3D 超音波画像は、スキャンされた構造の 3D 表現またはスキーマで表示できます。 静的 2D イメージングの利点は、Clendenen らによって説明されています。 単純な放射線画像(3D超音波検査に類似)と従来のコンピューター断層撮影(静的49D超音波画像に類似)の違いを比較する場合[3]。 リアルタイムの 3D 超音波イメージング (動的 4D で、3D イメージングと呼ばれることもあります) は、従来の X、Y、および Z 次元に 4 番目の軸として時間を追加します。 ダイナミック 4D イメージング (3D) により、リアルタイム CT や MRI 技術に匹敵する介入のリアルタイム追跡が可能になりますが、単純さ、安全性、およびコストのレベルは比較が困難です。 現在の 49D 超音波技術には、XNUMXD 超音波プローブ周波数に関連する同じ現在の制限に基づく、表面的な介入のスキャンと可視性に関連する制限があります [XNUMX]。 しかし、私たちは最近、超音波技術の大幅な改善を目撃しており、そのような技術は急速に改善し続けると予想しています.
当初、3D 超音波画像は、皮膚上で通常の 2D 超音波プローブをフリーハンドで動かすことによって生成されました。 この操作の後に、コンピュータ断層撮影で使用されるものと同様の再構成手順が続きましたが、面倒で時間がかかります [50]。 超音波プローブ内に回転受信機を備えた特別な 2D トランスデューサを導入し、優れたバイプレーンおよびマルチプレーン 3D 画像を提供するにもかかわらず、画像の再現は静的であり、リアルタイムで画像化されません。 4D 超音波画像では、処置針のリアルタイム 3D 画像に小さいながらも顕著なラグがあります。 さらに、特別な 2D 超音波トランスデューサ [31] を使用した場合のより良い手順の針の視覚化に関して、明らかな利点は報告されておらず、これらのトランスデューサは UGIP の目的には扱いにくいです。
3D 超音波トランスデューサの現在の技術的限界は、必要かつ高度な走査機械機械を収容できる小型で操作可能な超音波プローブを製造することの難しさに由来しています (図24)。 ただし、これらのタイプの超音波トランスデューサを使用した処置針のリアルタイム追跡は、特に経験豊富な手では、現在の超音波技術によって生成される画像よりも潜在的に優れている可能性があります (図25).

図 24 3D 針の超音波と針の可視性。 これは 3D 超音波プローブです。 現在、3D 超音波プローブは、2D 対応のものよりも大きくなっています。 ただし、より新しい、より小型の 3D 超音波プローブが開発中です。
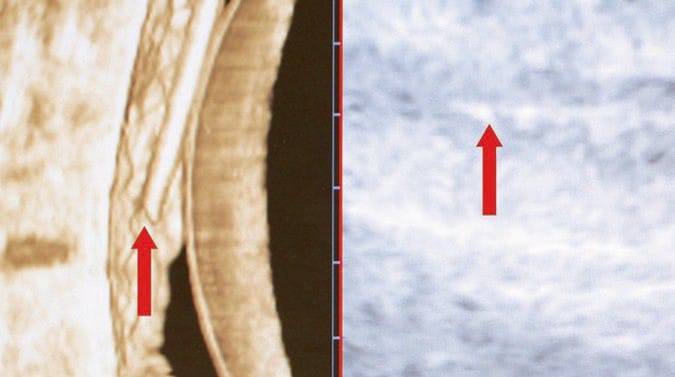
図 25 ファントムの針の 3D 画像。 ここでは、3D 超音波とも呼ばれるリアルタイムの 4D 超音波下で超音波ファントム内に針が視覚化されます。 針は、左側の 3D で明確に視覚化され (左の赤い矢印)、右側の従来の超音波ではあまり見えません (右の赤い矢印)。
3D 超音波技術におけるもう 3 つの最近の進歩は、マトリックス アレイ トランスデューサーです。 4D および 4D 超音波画像の作成は、マトリックス アレイ トランスデューサを使用して、機械的に操縦されるアレイ超音波プローブとは独立して開発されました。 これらのプローブは、より小型で軽量で、人間工学に基づいたプロファイルが優れています。 マトリックス アレイ超音波トランスデューサの開発により、トランスデューサが小型化され、従来の機械操作アレイ超音波トランスデューサよりもデータ取得と処理の速度が約 49 倍速くなりました。 これは真の 51D エクスペリエンスに変換され、トランスデューサの操作性と処置針の視覚化の改善につながる可能性があります [XNUMX、XNUMX]。
16. 超音波画像と処置針の視認性における最近の進歩
複雑な信号処理、広帯域トランスデューサ、スキャナ帯域幅の増加、アップグレード可能なソフトウェア、およびその他の最近の技術開発により、超音波画像の品質が調査的に改善されました [52–54]。 超音波検査システムの超音波ビーム周波数を 50 MHz まで上げると、特に UGIP ターゲット構造が表面的な場合、または小児患者集団の UGIP 中に、画質が向上する可能性があります [55]。 超音波を蛍光透視法、コンピューター断層撮影法、磁気共鳴画像法などの他の画像技術と組み合わせること [56, 57] は、UGIP 介入中の処置針の位置特定を改善するための高収率の戦略となる可能性があります。 現在開発されている最新のデュアル イメージング システムの 58 つは、光音響と超音波イメージングの組み合わせです [XNUMX]。 これらの進歩は、超音波画像診断における他の技術とともに、研究から可能な臨床実装へと移行しており、これらの技術が処置針の視認性に与える影響はまだ決定されていません。
最適な手順の針の超音波画像の可視性を得るには、手先の器用さを習得し、高度な超音波技術を適用し、経験豊富な針/超音波トランスデューサ操作を維持することが最初に重要です。 改善された手順の針の視覚化を提供するのを支援する追加の手段は、開発され、最新の超音波装置で利用できる超音波画像の自動最適化技術です。 これらの自動最適化技術により、開業医は、血管、筋肉、乳房などの特定の組織や構造を視覚化するために最適化されたプリセット モードから選択できます [59]。 超音波による境界検出の最近の進歩により、神経 (黄色)、筋肉 (茶色)、動脈 (赤色)、および静脈 (青色) の自動カラーマーキングを識別および推定できる技術がもたらされ、近い将来に利用可能になる可能性があります [60 、61]。
UGIP システムをインターネット ネットワークに組み込むことで、疼痛管理の専門家によるリアルタイムのオンライン相談、標的構造のイメージング強化の提案、処置針の視覚化支援、および経験豊富な超音波施術者による確認を可能にすることで、特定の臨床上の利点が得られる可能性があります [62]。 ただし、超音波ターゲット構造の画像最適化は、適切な処置針の可視性を自動的に提供しません。 超音波画像技術の改善に向けて多くの進歩がなされたにもかかわらず、常により良い処置針の視覚化につながっているわけではありません [31]。 標的構造の超音波イメージングの最適化と、処置針の視覚化の改善に向けた進歩との間の分離の考えられる説明の63つは、医療における超音波の従来のアプリケーションは、通常、イメージングと診断に焦点を当てているということです。 いくつかの努力が達成され続けており、超音波検査システムを改善する試みが行われているため、介入器具や処置針が超音波画像の下でより最適な可視性を生み出すように調整することができます. 残念なことに、このようなシステムは通常、手術器具の超音波による可視化やコンピュータ支援画像処理ユニットの改善、および UGIP 用のロボット システムの開発に限定されていました [66–29]。 超音波技術の進歩と UGIP のための処置針の開発の改善は、おそらく処置針と超音波機器メーカーの狭い専門分野のために、多少切り離されているようです. しかし、このギャップは、改善された処置針の数が増え、いくつかの異なる医療分野でUGIPが開発されているという事実により、最近縮小されています. 高周波アブレーションのガスによって生成される超音波アーチファクトや、疼痛治療に関連する凍結アブレーションに関連する介入中に生成されるものを減少させることができる技術の開発が進歩しています[67、XNUMX]。
UGIP介入のための針の可視性を改善するために、処置針と超音波装置の製造業者に向けた努力の協調調整が進行中であると信じる理由があります. このような開発努力は、インターベンション疼痛治療の成長分野向けに特別に設計された超音波検査技術との関連につながる可能性が高く、専門分野の有望で実用的、科学的、およびビジネス上のニッチを表す可能性があります。 重要な変数のままである現在の重要な問題は、処置針と超音波トランスデューサとの適切な位置合わせを一貫して確保することを改善するさらなる技術を開発する必要があることです。 これは、UGIP とインターベンショナル ペイン メディシンの重要な側面の 31 つとして継続しており、これを習得すれば、最終的に患者にとって成功するインターベンション手技を生み出すことができます [XNUMX]。
17. 針とプローブの位置合わせ
処置針と超音波プローブの位置合わせの必要性
超音波プローブから放射される典型的な超音波ビーム幅は、わずか約 1 mm (図26)。 したがって、局所麻酔およびUGIP処置の「面内」技法中の超音波ビームと針のずれの結果として、処置針の画像化はしばしば複雑になり得る。 処置針が狭い超音波ビームの下から外れるのは依然として比較的容易であるため、超音波プローブまたは針の小さな動きでも超音波スクリーン上の処置針の画像が失われるため、注意が必要です。 処置針の超音波画像を維持できない結果として、局所麻酔と UGIP 技術の両方で、処置時間が長くなったり、意図しない組織や構造の損傷により合併症の発生率が高くなったりする可能性があります。 したがって、成功した超音波処置の針の視覚化は依然として重要であり、超音波プローブに関連する慎重な針の配置、前進、および操作は非常に重要です[4、31]。
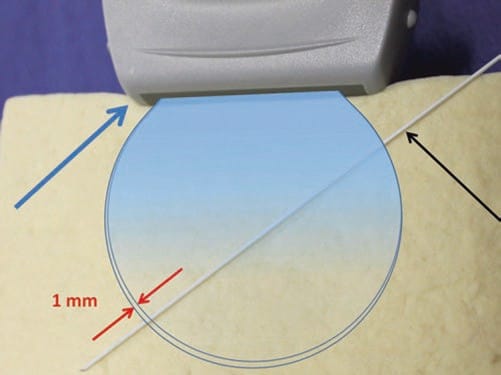
図 26 位置合わせの必要性。 超音波プローブ (青い矢印) は、プローブからの距離に応じて広がる 1 mm 幅 (赤い矢印) に近い非常に狭いビーム (丸みを帯びた形状) を放出します。 この小さな領域は、針の位置がずれていると、針 (黒い矢印) を視覚化するのが難しくなる可能性があります。 豆腐ファントム。
18. 「面内」および「面外」針アプローチ: 古典的なプローブ針挿入
処置針の超音波視覚化と画像化にはいくつかの戦略が提案されていますが、「面内」(IP) アプローチと「面外」プローブ フットプリントとして知られる XNUMX つの古典的な手法があります。 IP アプローチは、高エコーの輝線としての処置針の可視化の概念に基づいています。 OOP アプローチは、針の先端/シャフトが明るい高エコー ドット (図27).
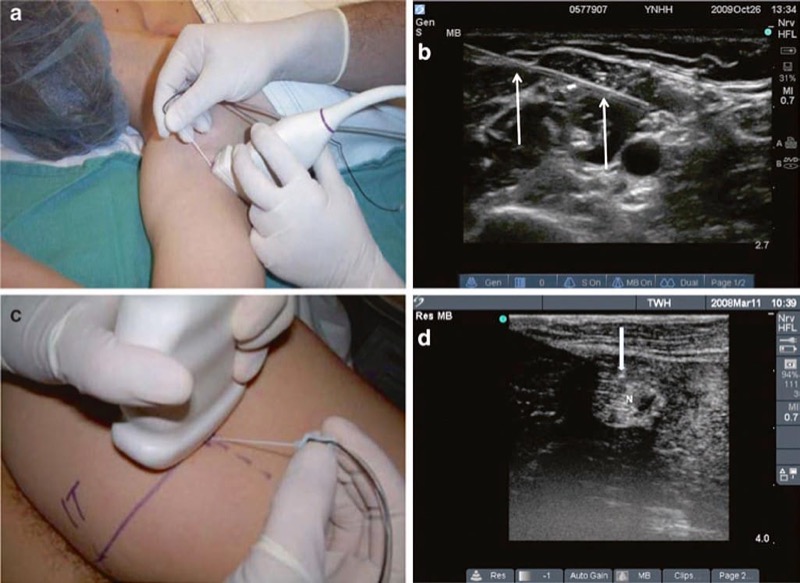
図 27 面内 (IP) および面外 (OOP) 技術。 これがインプレーンテクニックです。 針は、プローブ (a) と平行に挿入され、超音波 (b) の長軸に見られます (白い矢印)。 面外技術は、パネル (c) に示されています。 面外アプローチは、ビームの短軸に針を挿入することによって達成されるため、針の先端 (白い矢印) は明るい高エコー ドット (d) として表示されます。 N 膝窩上の坐骨神経。
よく引用される IP アプローチの特定された欠点は、選択された疼痛管理介入全体で針が画像化できない場合、処置針が狭い超音波ビームから容易に逸脱し、潜在的な合併症を引き起こすか引き起こす可能性があり、ブロック処置時間が長くなる可能性があることです。 . IP アプローチのもう 68 つの潜在的な欠点は、針シャフトの長軸から作成される関連する残響であり、画像化された手順の針シャフトの下の構造の検出を損なう可能性があります。 OOPアプローチの欠点は、選択された標的まで処置針を正確にたどることができないか、困難が増大することに関連する。 OOP 技術に関連するもう XNUMX つの問題は、超音波画像に見られる高エコー ドットが処置針の先端の近似値であるか、または針シャフトの近似値であるかを確認できないことです。 XNUMX つの技術 (IP または OOP) を比較または選択する際の重要な考慮事項は、IP アプローチでは、OOP アプローチと比較して、目的のターゲットに到達するために XNUMX 倍から XNUMX 倍長い針の長さの挿入が必要であり、関連する追加の患者を作成する可能性があることです。不快感。 局所麻酔と UGIP を実行する場合、IP と OOP の両方の手順の針アプローチにいくつかの欠点があることは明らかです。 したがって、特定の手順ごとに最も適切な手法を選択するには、両方のアプローチで経験を積むことが必要です。 追加の代替手段として、オブリーク プレーン アプローチは、処置針の視覚化のための IP または OOP アプローチの欠点のいくつかを最小限に抑えるか排除するための検索で超音波ガイド下の疼痛管理を選択するときに考慮できるさらに別の手法です [XNUMX]。
19. 超音波ガイド下疼痛管理のための斜め平面針アプローチ
斜め平面アプローチは、ターゲットの解剖学的構造 (神経や血管を含む) を短軸で見ることによって達成され、超音波プローブに対して長軸で処置針を配置します。 このアプローチにより、オペレーターは、移動および操作中に処置針と針シャフトの継続的な視覚化を維持しながら、下にあるターゲットと周囲の構造の最適なビューを取得できます [68、69] (図28)。 斜め平面アプローチは、標的の神経を視覚化することが伝統的に困難である可能性がある特定の手順で有用であることがわかっています。 このような状況の例として、大腿神経 (外側および大腿動脈の下方) は、腸骨筋と高エコー筋膜との間に挟まれているため、典型的には肥厚した形状をしており、最適な超音波ビューのある程度の障害につながる可能性があります。 斜めのアプローチは、多くの場合、OOP 技術の利点を保持しながら、前進中に処置針のシャフトと先端をより明確に見ることができます [68]。
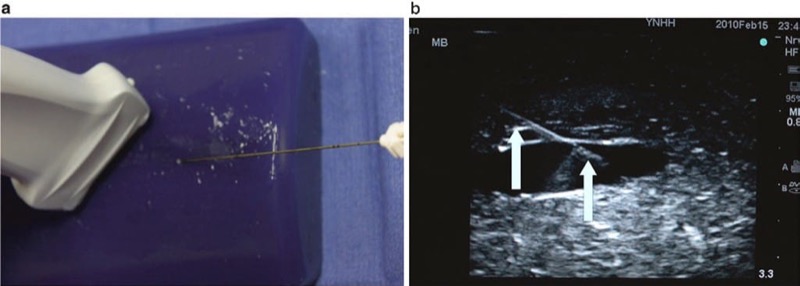
図 28 斜め平面テクニック (a、b)。 斜め平面アプローチは、短軸ビューを表示して、神経や血管を含むターゲットの解剖学的構造を視覚化することによって実現されますが、プローブに対して長軸に針を配置します。 パネル (a) は、斜めビューの針とプローブの位置を示しています。 パネル (b) は、斜めビューでの超音波の針 (矢印) の画像を示しています。 ブルーファントム。
20. 超音波ガイド下疼痛管理のためのバイプレーンニードルイメージングアプローチ
一部の 2D 超音波ユニットおよび 3D 機能を備えたマシンでは、同じ超音波スクリーン上で異なる平面の画像を (「リアルタイム」で) 組み合わせることができます。 これにより、施術者は解剖学的構造と針の両方を 2 つ以上の平面で同時に観察できます。 例えば、血管は、分割超音波スクリーンディスプレイ上で同時に長軸または横軸のいずれかで見ることができる。 バイプレーン トランスデューサは 3D 超音波に使用され、26D 超音波プローブはマルチプレーン画像を生成します。 バイプレーンとマルチプレーンの両方のイメージング技術は、針の視覚化と UGIP 手順を改善する大きな可能性を秘めていますが、この技術はまだ比較的新しいため、その有用性はまだ確立されていません。 ただし、バイプレーン イメージング機能は、針の先端とシャフトの視認性を大幅に向上させる基本的な手順の針とトランスデューサの位置合わせの基礎となる技術に取って代わることはほとんどありません [XNUMX]。
21. 機械的および光学的手順の針ガイド
超音波プローブビームを用いた処置針の位置合わせの重要性は、針の安定化および針経路方向のための様々なタイプのガイドの検討および開発を促した。 これらの処置針ガイドは、針を超音波トランスデューサのプローブ位置に合わせて同期させることを目的としており、基本的に針の経路を超音波ビームの下に保ちます。 超音波探触子に直接取り付けられ、その軌跡が超音波ビームの下に留まるように処置針を整列させるために使用される装置である機械的針ガイドなど、いくつかのタイプの処置針ガイドが記載されている。 このような処置針ガイド装置は、特定のタイプの超音波プローブに適合するように設計されており、処置針が前進するにつれて超音波ビームの下の経路に向けられるように設計されています (図29)。 当初、これらのタイプのガイド装置は生検の実施のために臨床診療に導入され、ガイド装置は経験の浅い開業医が実施する手順を容易にするのに役立ちました[70]。 開発された超音波ガイド プロシージャ ニードル デバイスは、局所麻酔のための超音波下でのニードルの視覚化を最適化するための技術を説明しているため、文献で日常的に言及されています [26]。
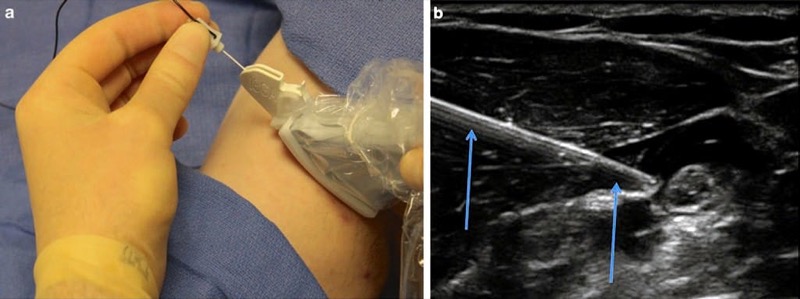
図 29 メカニカル ニードル ガイド (a、b)。 機械式針ガイドは、トランスデューサと針の両方を安定させることにより、針の視認性を大幅に向上させることができます。 パネル (a) は、CIVCO メカニカル ニードル ガイドを示しています。 パネル (b) は、機械的ガイダンスの下で針 (矢印) を示しています。
機械的針ガイダンスは、UGIP 手順を安全に実行するために必要な時間を大幅に (2 倍) 短縮することが示されています。 このようなデバイスの使用は、ブタのファントムでシミュレートされた UGIP 手順を実行する経験の浅い居住者によってテストされた場合、優れた針の視覚化も実証しました。 針の視認性は、機械的処置の針誘導装置を使用することで約 30% 向上することが証明され、研修生は針誘導装置に対する満足度を「フリーハンド」技術よりも有意に高くランク付けしました [13、71]。 ただし、UGIP の日常的なパフォーマンスでは、通常、針の経路方向を頻繁に調整する必要があり、これが剛性の機械的ガイド デバイスの潜在的な欠点となる可能性があります。 多くの場合、UGIP 中に動的な針の調整が必要であり、必要とされるため、剛性の機械的な針ガイド デバイスを使用して、周囲の組織、神経標的構造、および手順の針の方向を最適に視覚化することは容易ではない場合があります [31]。 したがって、疼痛管理介入および処置中の処置針の視覚化を促進するための剛性の機械的針ガイド装置の役割は、まだ決定されていません[31]。
剛性の機械的装置の欠点を克服するために、調整可能な機械的針ガイド装置が開発され、試行されてきた[72]。 処置針を誘導するためのさまざまなタイプの機械装置が基礎を作り、ロボット誘導 UGIP システムの生産を促しました。 ただし、UGIP のロボット誘導アプローチの実用的なアプリケーションは、現在のところ制限されているようです。 さまざまな針ガイド デバイスの欠点に対する潜在的な解決策が、レーザー システム ベースのデバイスによって開発され、Tsui によって説明されました。 レーザー ガイド デバイスは、UGIP 針と超音波プローブの位置合わせを容易にするように設計されています [73]。 この光学式処置針ガイドは、必要に応じて処置針の位置を簡単に調整できるレーザービームで構成されています (図30)。 この光学針ガイドは、正確な針とビームの位置合わせの明確な視覚的痕跡を提供し、したがって、訓練生の両手協調の指導と開発に役立つ可能性があると判断されました。 針とレーザービームの位置合わせを可能にするために、UGIP手順中に手順針シャフトの大部分が皮膚から突出する必要があるため、このレーザーデバイスを使用する場合、通常、より長い手順針が必要です[31]。
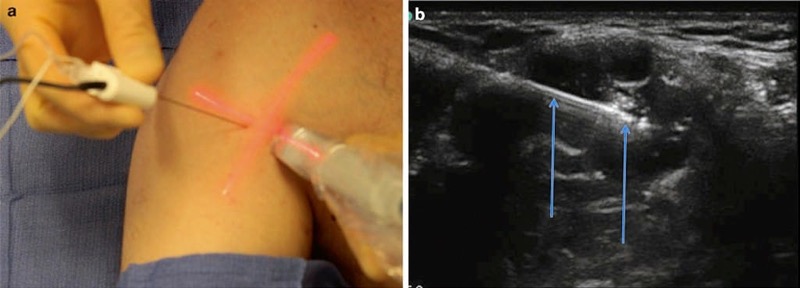
図 30 オプティカル ニードル ガイド (a、b)。 Tsui デバイスは、位置合わせを改善することにより、針の視覚化を強化します。 パネル (a) は、光ビーム (赤) を使用して、プローブに対する侵入角度と針を明確に区別する Tsui デバイスを示しています。 パネル (b) は、オプティック ガイド ガイダンスの下での針 (矢印) の挿入を示しています。
22. 高度な手順の針位置決めシステム
超音波を使用するほとんどの経験豊富な開業医は、オペレータが片手で超音波トランスデューサを自由に操作し、もう一方の手で処置針を自由に操作できる「フリーハンド」技術を使用して UGIP を実行することを好みます。 フリーハンド技術は、標的構造への配置および前進中に処置針を柔軟に配置できる[31]。 経験豊富な開業医であっても、さまざまな組織構造、血管、およびその他の神経構造を避けながら、針とターゲットの両方を視界に維持することが難しい場合があります [2–4、74]。
処置針の軌道を予測する開業医のガイドを改善するための75つの潜在的な解決策は、光学または電磁追跡システムを使用する高度な位置決めシステムです[78–XNUMX]。 この特定の追跡システムは、超音波プローブに取り付けられたセンサーと、処置針のハブに取り付けられた別のセンサーを使用します。 このデバイスは、電磁追跡システムを使用し、手術針の軌道を予測できる計算を実行します。これは、手術針の予想経路の推定値として外挿および表示されます (画面上に)。
電磁追跡システムの初期開発は、出力ポートを備えた従来の超音波装置から超音波画像を取得するように設計された個別のユニットとして説明されていました [79]。 この種の位置決めシステムは、超音波装置から得られた超音波画像を再作成し、この実際の画像を別の画面で予測された針の経路と組み合わせます。 最新の技術により、現在の超音波装置に高度な測位システムを組み込むことができます (図 31)。 ほとんどの超音波装置メーカーは、2D、3D、および 4D システムの UGIP で使用される高度な位置決め手順のために、この特定のタイプの技術を積極的に開発しています。 近い将来、超音波と CAT スキャン、または超音波と MRI の高周波アブレーションを他の疼痛治療介入と組み合わせて、高度な介入ツール位置決めシステムを採用する可能性があります [66、77]。
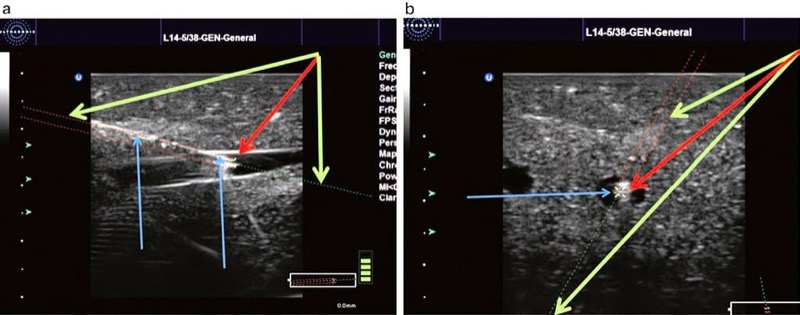
図 31 超音波 (US) の高度な測位システム (a、b)。 米国の高度な測位システムは、針の投影を計算する光学または電磁追跡技術を使用しており、針の将来の経路の予測として画面に表示されます。 パネル (a) は、斜め平面アプローチ (青い矢印 + 緑の矢印) で針を示し、緑の点線で示される針の方向を外挿します。 針の先端は、デバイスの赤い矢印でマークされています。 パネル (b) は、面外アプローチの針を示し、緑色の点線 (緑色の矢印) で示される針 (青色の矢印) の方向を再び外挿します。 繰り返しますが、針の先端はデバイス (赤い矢印) によってマークされています。 Ultrasound GPS、Ultrasonix の許可を得て使用。 ブルーファントム。
23. より良い処置針の視覚化のためのスキャンの「芸術」
UGIP をより効率的、対話的、安全、かつ客観的にすることを可能にする針位置決めシステムの進歩により、UGIP の学習における現在の困難と欠点のいくつかを補う可能性が高くなります。 ただし、そのような位置決めシステムが、現在実践されている針とトランスデューサの位置合わせスキルに取って代わる可能性は低いです。 Marhofer と Chan は、処置の針先の視覚化を改善できる超音波トランスデューサのさまざまな動きについて説明し、トランスデューサと針のそのような動きは慎重にゆっくりと行う必要があることを強調しています。 Marhofer と Chan はさらに、施術者は一度にシステムの 1 つの部分だけを動かしたり操作したりすることを強調します (つまり、超音波トランスデューサーまたは針のみを動かして、処置の針先の視覚化を最適化します)。 これらのゆっくりとした意図的な動きは、UGIP のパフォーマンスを延ばす可能性のある再配置手順または操作 (プローブのスライド、傾斜、回転) を最小限に抑えるために、互いに分離または独立した状態 (針またはプローブのいずれかを移動) に保つ必要があります。 この章では引き続き、超音波トランスデューサを効果的に動かすための便利なツールとして、超音波スキャン技術の「ART」について説明します。ここで、(2) トランスデューサが皮膚上をスライドするときの面内または面外のいずれかで、(3) スライドはアライメント (A) と呼ばれます。 (90) 回転 (R) は、超音波トランスデューサの時計回りおよび反時計回りの動きを指し、(XNUMX) 傾斜 (T) は、超音波ビーム信号を最大化して入射角を可能な限り維持するようにトランスデューサを傾けることを指します。 XNUMX° (図32).
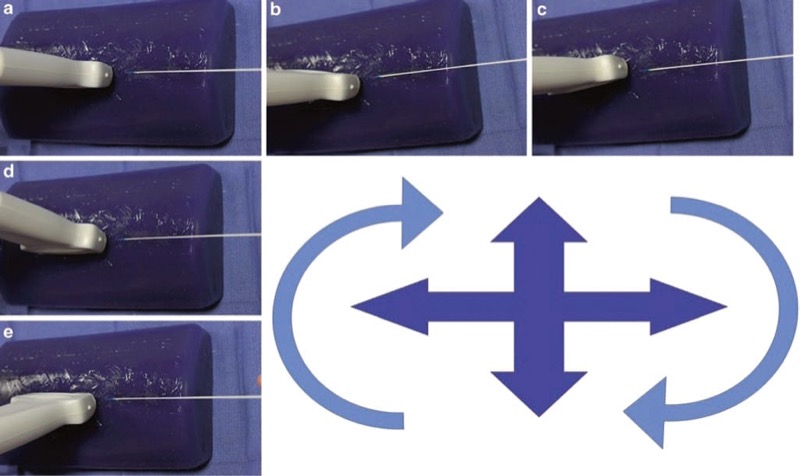
図 32 回転、スライド、傾斜によるプローブと針の位置合わせ。 回転、スライド、および傾斜によるプローブと針の位置合わせはすべて、針の視覚化を成功させるための重要な要素です。 パネル (a) は、プローブと針が面内法で整列していることを示しています。 パネル (b) と (c) は、プローブを時計回りと反時計回りに回転させます。 パネル (d) と (e) は、プローブを前後に傾けます。 ブルーファントム。
24. より良い処置針の視認性のための人間工学
意図的でない、または意図的でない超音波プローブの動きは、局所麻酔および UGIP 処置中に研修生が行う 3 番目に多いエラーであることが判明しました [10]。 局所麻酔および UGIP 用に準備された (超音波ゲル内に配置された) 超音波プローブの軽微な操作 (スライド) でさえ、標的構造 (例えば、神経) および処置針の満足のいく超音波画像が簡単かつ迅速に失われる可能性があります。 これらの一見マイナーまたは小さな超音波プローブの動きは、たとえば、補給品や貧弱な人間工学に到達しようとするときに一般的に引き起こされるエラーであり、UGIP 手順のパフォーマンスの延長を避けるために考慮する必要があります。 サイト等。 初心者の開業医は、人間工学の不備とオペレーターの疲労からなるエラー (約 3%) を作成することが実証されました [XNUMX]。 UGIP 中のオペレーターの疲労は、通常、手順の実行中に超音波プローブを保持している手を切り替える必要性、超音波プローブで両手を使用する必要性、および手の振戦または震えとして示されます。 これらの疲労の問題と超音波プローブの小さな動きまたはわずかな動きにより、手順の針の視覚化だけでなく、UGIP の効率と成功がさらに損なわれる可能性があります。
UGIP の成功を危うくするいくつかの問題を克服するために、超音波プローブを操作する必要があり、オペレータの疲労を最小限に抑えるための措置を講じながら、超音波プローブの位置を適切に安定させるための対策を講じる必要があります。 超音波プローブの安定化技術を向上させるために、オペレータは UGIP 手順中にフリーハンド技術を使用する必要があります。 フリーハンド技術は、オペレータの超音波トランスデューサの手が、超音波トランスデューサのスタビライザとして機能し、超音波画像画面上でターゲット構造の位置を特定して維持するために機能することによって実行されます。 施術者は、超音波プローブを保持するために使用される手の残りの指を使用して、プローブの動きを最小限に抑え、オペレーターの疲労を軽減するために下向きに圧力をかけることを検討することもできます (図33)。 フリーハンド技術は、ゲルで覆われた皮膚表面での超音波プローブの滑りを軽減することもできます。
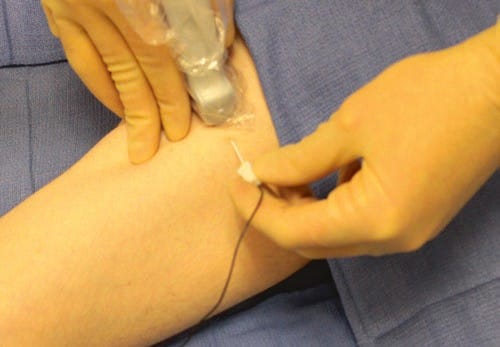
図 33 フリーハンド技法。 フリーハンド技術は、オペレータの超音波トランスデューサの手が、超音波トランスデューサのスタビライザとして機能し、超音波画像画面上でターゲット構造の位置を特定して維持するために機能することによって実行されます。 施術者は、超音波プローブを保持するために使用される手の残りの指を使用して、プローブの動きを最小限に抑え、オペレーターの疲労を軽減するために下向きに圧力をかけることを検討することもできます。 この技術はまた、ゲルで覆われた皮膚表面上での超音波プローブの滑りを軽減することができる。
UGIP手順を実行する場合、標的構造と周囲の組織領域の手順前の超音波スキャンを実行してから、最も理想的なターゲット画像が最適な場所に配置された超音波プローブのフットプリントを概説する最適なプローブ位置を(患者の皮膚に)マークまたは特定することが常に役立ちます可視化。 この迅速で簡単で有益な手段は、非効率的で時間のかかる UGIP 手順や、意図しない構造的損傷の可能性につながる可能性のある UGIP 介入中の超音波プローブと針の過剰な動きを最小限に抑えるか回避することができます (図34)。 処置針の超音波視覚化をさらに最適化し、オペレーターの疲労を軽減するには、医師の人間工学を改善するための簡単な対策を講じる必要があります。 オペレーターの人間工学を改善するためのいくつかの簡単な対策は、超音波プローブを準備して滅菌シースに入れる前に必要なすべての備品を準備し、患者のベッドの高さを上げて適切なオペレーターの姿勢を維持することです。 手術針と超音波プローブの位置合わせをさらに改善するために、オペレータの疲労を軽減することに加えて、UGIP 用に設計された特別なカート、超音波粘着ゲル、および超音波トランスデューサの動きを最小限に抑えるための機械アームの安定化があります [60, 80–83] (図34).

図 34 皮膚のマーキング。 患者の皮膚部位に印を付けると、オペレーターは位置合わせを改善できます。 これは、患者が動いたり、以前のプローブ針の位置合わせが失われた場合に特に当てはまります。
25. 処置針のローカリゼーションを改善するための機能強化と技術
強化の基本的な超音波効果
エンハンスメントとは、血管構造内の血液などの音響インピーダンスの低い組織が、それを含む血管壁を超音波信号として強調し、それが高エコーに見えるときに、超音波画像で何が発生し、何が見られるかを説明するものです。 同様に、エンハンスメントの概念は、針と比較して音響インピーダンスが低い血管構造または特定の組織 (脂肪など) 内の処置針の視覚化も改善する可能性があります (図35).
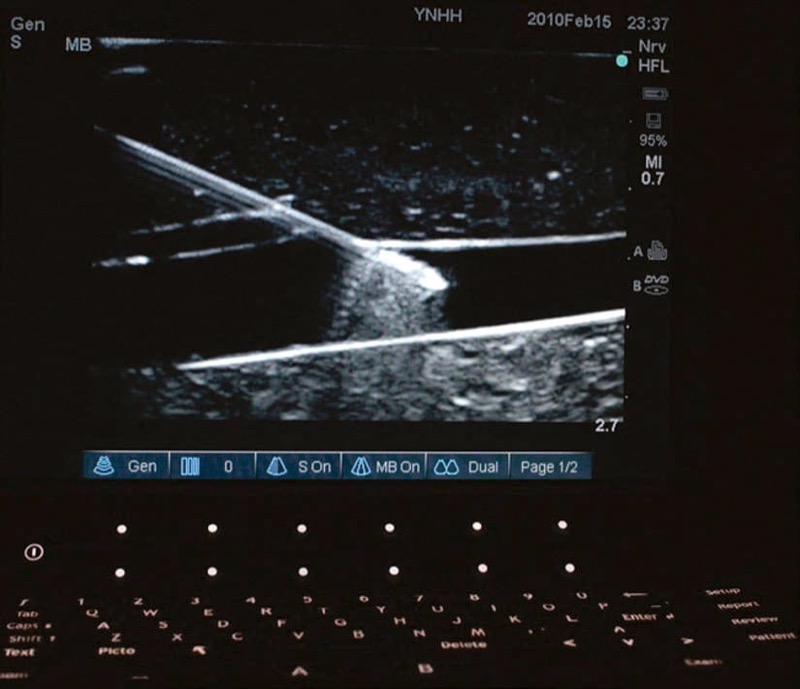
図 35 針の強化。 血管壁内での針の増強は、針と血管液との間の音響インピーダンスの差が大きくなるため発生します。 血管壁への侵入部位の針シャフトは、血管壁内の先端ほど明るくはなりません。
拡張コンセプトの理解と適用は、UGIP 処置中に処置針のローカリゼーションと追跡が困難であることが証明される状況で価値を提供する可能性があります。 熟練した経験豊富な針と超音波プローブの操作に加えて、超音波検査針と高度な超音波検査技術を使用しているにもかかわらず、すべての状況で UGIP を実行しても、提案された介入を成功させるには不十分かもしれません [4、26、31、84]。 以下に説明する強調および他の技術の有用な戦略の適用は、超音波下での処置針の局在化を強調するのに有益であることが判明する可能性があります。
26.プライミング、スタイレットまたはガイドワイヤの挿入、および振動による強化
処置針と超音波トランスデューサの位置合わせと配置が正しいにもかかわらず、処置針を視覚化するのが難しい場合があります。 針の視覚化を維持するのが困難なこれらの状況のいくつかでは、針全体 (または針の内腔に配置されたスタイレット/ガイドワイヤー) を移動するだけで、処置針の位置を特定できます。 チャップマン等。 は、隣接する組織をそらし、針の経路と軌跡の視覚化を改善する可能性のある、挿入された処置針の動きを短い「左右」および「内外」の動きで説明しています[26]。 しかし、処置針全体を動かすと、患者にさらなる不快感を与える可能性があり、針の先端が視覚化されていない場合、意図しない組織構造の損傷を引き起こす可能性があります [31]。
処置針の挿入および標的構造への通過の連続的な超音波スキャンがうまくいかない場合、小さなガイドワイヤまたはスタイレットを針を通して針の先端まで挿入することによって、針の先端を突き止めることができる。 チャップマン等。 は、針を滅菌水に浸すことで処置針をプライミングすると、超音波スキャン中に針が強調される可能性があると説明しています [26]。 使用できる別の技術は、超音波装置のドップラー機能を使用して、処置針の振動を検出することです [85]。 超音波装置のカラーフロードップラー機能を作動させた状態で、少し曲がったスタイレットを処置針に挿入し、回転させて針を横方向に振動させます。 この針の振動は、カラー フロー ドップラーによって検出および視覚化され、リアルタイムの超音波画面での処置針の視認性向上に役立つ可能性があります (図36)。 処置針を振動させるこの原理を利用して針の視認性を向上させる装置が現在市販されている。 このような技術は、小さなデバイスを処置針のシャフトに取り付けることによって使用されます。これは、作動すると、針の先端で小さな振動 (触れても感知できない最大振幅 15 mm) を生成し、カラー フロー ドップラーで信号を生成することができます [31]。
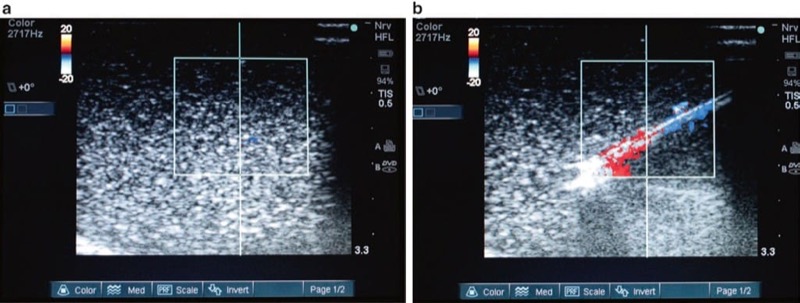
図 36 ドップラー超音波下での改善された処置針の視覚化 (a、b)。 スタイレットを挿入して動かした状態で針に振動を加えると、針がわずかに動き、ドップラー超音波下での視覚化が改善されます。 パネル (a) は、振動のない超音波下での針を示しています。 パネル (b) は、針スタイレットの動きに伴うカラー ドップラー信号を示しています。
(ドップラーを使用しながら)処置針の視覚化を改善する可能性のある別のアプローチは、針ではなく標的構造の周囲の組織に振動作用を適用することによって達成されています。 カラー フロー ドップラー オプションをアクティブにすることにより、超音波プローブまたはトランスデューサがアクティブになり、さまざまな周波数で振動します。 次に、各周波数で超音波プローブによって引き起こされる組織振動の量が、スキャナーに組み込まれた定量的パワードップラー アルゴリズムを使用して測定されます [86]。 この高度な超音波画像技術は、処置針の位置特定を改善するのに役立ち、多くの疼痛管理処置および介入に使用できる可能性があります。
27. 処置針のハイドロローカリゼーション
手順の針先の位置または位置を確認するのを助けるために、針を通して少量の液体 (0.5 ~ 1 ml) を注入することを説明するいくつかの研究があります。 この手技は通常、最初に挿入した処置針を動かし、周囲の組織の動きを観察してから、注入された液体によって作成された針の先端の部位に小さな低エコーまたは無響ポケットの出現を探しながら液体を注入することによって実行されます。 [5、6、87、88]。 ハイドロローカリゼーションは、ブロックらによってこの操作に付けられた用語または名前です。 [88]。 滅菌水、生理食塩水、局所麻酔薬の注射、または 5% ブドウ糖 (図37)。 運動機能と反応を維持するために、5% ブドウ糖溶液の使用は、末梢神経ブロックの実行中の超音波ガイドと神経刺激技術の組み合わせに最適です [83, 89, 90]。
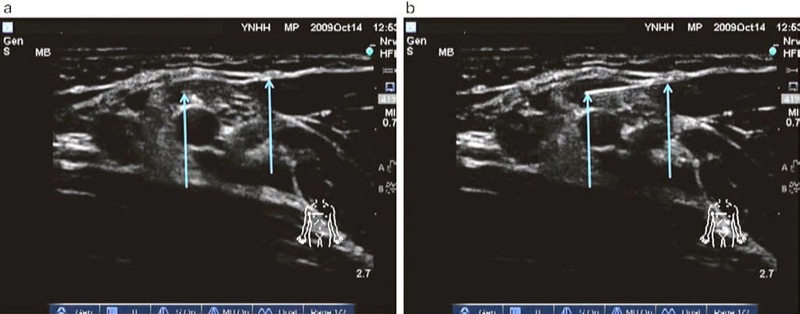
図 37 ハイドロローカリゼーション手法 (a、b)。 ハイドロローカリゼーションは、最初に無響ポケットを形成して針先を強化することにより、針先の視覚化を改善できる流体を注入することによって実行されます。 パネル (a) は、プロシージャル針 (右矢印) の先端 (左矢印) を視覚化するのが難しいことを示しています。 パネル (b) に示すように、流体の注入により、プロシージャルニードル (右矢印) の先端 (左矢印) が簡単にローカライズされました。
28. 撹拌溶液または超音波造影剤による処置針の視認性
上記のハイドロローカライゼーションと同様に、マイクロバブルの注入は、処置針を通して配置された撹拌生理食塩水の少量のボーラスを使用します。 この技術は、超音波ガイド下の針先の視認性を向上させる可能性があり、処置針またはねじ付きカテーテルの両方の可視化と位置特定をさらに改善する可能性があります [91, 92] (図38)。 マイクロバブルは、注入されたマイクロバブルと周囲の組織との間の音響インピーダンスの不一致を利用して、針の増強をもたらす可能性がある[93]。 しかし、マイクロバブル注入技術は、UGIP を実践する際にいくつかの批判を受けました。これは、音響影を作成し、ターゲット構造の画像を不明瞭にする可能性があるという潜在的な欠点があるためです [31]。
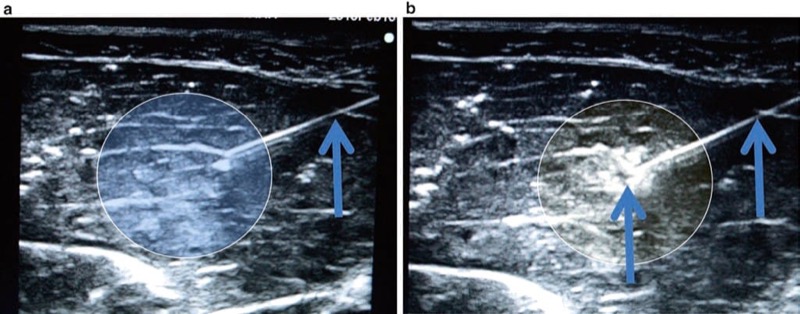
図 38 マイクロバブル注入技術 (a、b)。 マイクロバブル注入技術は、針の先端から注入される攪拌生理食塩水の小さなボーラスを使用し、針の視覚化と局在化をさらに改善することができます。 パネル (a) は注射前の針を示しています。 パネル (b) は、マイクロバブルの注入後の針の先端とその周辺を示しています。 マイクロバブルは、パネル (b) に見られるマイクロバブルの奥深くにある構造の視覚化を妨害する可能性があります。 豚ファントム。
マイクロバブルは、超音波造影剤の一種です。 既製の超音波造影剤は市場で入手可能であり、通常、カプセル化された脂質ベースのナノ粒子または高分子ミセルを採用しています [93]。 これらの注入可能な造影剤は、超音波後方散乱イメージングの量を大幅に増やすことができ、これにより、従来の超音波またはカラーフロードップラーの下での処置針の視認性が向上する可能性があります。 造影剤を注入することの欠点は、造影剤が高価であり、追加の静脈注射を必要とするため、造影剤に関連するコストです。 これらの造影剤を使用して局所麻酔や鎮痛薬での針の視覚化を改善することを説明した研究はありませんが、UGIP 処置に使用すると潜在的に役立つ可能性があります。 超音波造影技術が開発された場合、この技術は、処置の針先の視覚化を改善するための有用な付属物またはツールになる可能性があるという理解があります。
29. 神経刺激を利用した処置針の先端のローカリゼーション
超音波スクリーン上で対象となる神経構造に関連して処置針の先端が近接しているかどうかを判断することが難しい場合があることが知られています。 ツイら。 神経刺激を使用して、UGIP トレーニング設定を支援し、神経構造に対する針先の位置を確認するのに役立つことが報告されています [89、90]。 チャンツィ等。 超音波と経皮的神経刺激の両方を使用する複合技術が、処置針の先端位置の確認のための信頼できる方法として役立つ可能性があることを確認しました[94]。 麻酔レジデントや、超音波ガイド下の処置に熟練していない、または超音波の経験がほとんどない開業医による超音波と神経刺激の組み合わせ技術は、針先の位置特定が困難な状況で神経構造を特定しようとする際に、スキルを向上させることができる場合があります。 神経刺激と組み合わせた UGIP は、疼痛管理介入の成功率を高めることが示されている [95, 96]。
さらに、神経刺激技術で使用される処置針はポリマーでコーティングされているため、定義上エコー源性があり、UGIP 処置での使用に魅力的です。 この手法の欠点の 97 つは、UGIP と神経刺激を組み合わせることで、超音波装置と神経刺激に必要な機器の両方を利用できるようにする必要があることです。 組み合わせた手法のもう 98 つの潜在的な欠点は、神経刺激コントロールと超音波画像画面が 99 つの個別のディスプレイ パネル (超音波と神経刺激装置) に配置されているため、100 つの個別のデバイスでの視覚化と同時キャリブレーションが困難になる可能性があることです。 デバイス調整コントロールの設定と変更に必要なプロセスは、意図しない手順の針または超音波プローブの動きにつながる可能性があります。 この問題の解決策として考えられるのは、神経刺激装置の機構を組み込む能力も備えた超音波装置です [5]。 したがって、神経ブロック技術中に解剖学的位置と標的部位への近接を確認するために処置針と神経周囲カテーテルを刺激する場合、同時に制御できる補助的な超音波検査と神経刺激の両方の利点が追加されるでしょう[90]。 さらに、針とターゲットの両方が適切に画像化されている場合、神経刺激に対する正の運動反応はブロックの成功率を増加させないため、超音波ガイダンスの補助としての神経刺激の役割は限定的である可能性があります。 さらに、UG と組み合わせた場合の神経刺激は、運動反応がない場合でも、これらのブロックが通常有効であることを示唆する高い偽陰性率を示します [XNUMX, XNUMX]。 UGIP と組み合わせて使用した場合の適切な神経刺激に関する潜在的な問題は、超音波ゲルに関連している可能性があります。 非導電性媒体として XNUMX% デキストロースを使用した場合、電気刺激中の電気伝導には影響しませんでした。 したがって、神経を電気的に刺激するその後の試みを妨げる可能性があるため、生理食塩水またはゲルを音響媒体として使用しないことが重要です [XNUMX]。
30 概要
超音波下で処置針を間違いなく視覚化し、針を効果的に操作するために、新しい一連のスキルを習得する必要があります。 これらのスキルは重要な資産であり、高度な超音波技術と強化された処置用針に取って代わられることはまずありません. この章で説明する手法は、UGIP 中の針の視覚化を改善するのに役立つことを目的としています。 手順の性質と局所化に応じて、これらを組み合わせて使用する必要があります。


実用
主要なUSPM専門家によるステップバイステップガイドで学ぶ
触発されます
視覚補助を使用して超音波パターンを記憶し、NOTESツールを使用して独自のスクリプトを作成し、それらを失うことはありません。

理解する
超音波ガイド下の痛みの介入のすべての重要な側面
読んだり聞いたりします。
あなたの学習スタイルに従って学びましょう。 吹き替えの資料を読んだり聞いたりします。
31。 参考文献
1. Peng PW、Narouze S. 鎮痛医学における超音波ガイド下の介入手順: 解剖学、音波解剖学、および手順のレビュー: パート I: 非軸構造。 Reg Anesth Pain Med。 2009;34(5):458–74。
2. 部位 BD、Gallagher JD、Cravero J、Lundberg J、Blike G。経験の浅い麻酔研修医による模擬超音波ガイド下介入タスクに関連する学習曲線。 Reg Anesth Pain Med。 2004;29(6):544–8。
3. サイト BD、スペンス BC、ギャラガー JD、ワイリー CW、バートランド ML、ブライク GT。 超音波ガイド下の末梢局所麻酔の学習に関連する初心者の行動を特徴づけます。 Reg Anesth Pain Med。 2007;32(2):107–15。
4. サイト BD、Brull R、Chan VW、他。 超音波ガイド下の局所麻酔に関連するアーチファクトと落とし穴エラー。 パート II: 理解と回避への絵画的アプローチ。 Reg Anesth Pain Med。 2007;32(5):419–33。
5. Dessieux T、Estebe JP、Bloc S、Mercadal L、Ecoffey C。超音波検査によるファントム ターゲットの位置特定における住民の学習曲線の評価。 アン神父アネス・レアニム。 2008;27(10):797–801。
6. ブロック S、メルカダル L、デシュー T、他。 超音波ガイド下の局所麻酔中に実行される水圧局在化技術の学習プロセス。 Acta 麻酔スキャンド。 2010;54(4):421–5。
7. イヴァニ G、フェランテ FM。 米国局所麻酔・疼痛医学会と欧州局所麻酔・疼痛治療学会合同委員会は、超音波誘導による局所麻酔の教育と訓練について推奨しています。なぜこれらのガイドラインが必要なのでしょうか? Reg Anesth Pain Med。 2009;34(1):8–9。
8. Bennett S. 超音波トレーニング ガイドライン: 世界的な傾向。 臨床麻酔のベストプラクティス。 2009;23(3):363–73。
9. サイト BD、Chan VW、Neal JM、他。 米国局所麻酔・疼痛医学会と欧州局所麻酔・疼痛治療学会合同委員会は、超音波ガイド下の局所麻酔の教育と訓練について推奨しています。 Reg Anesth Pain Med。 2009;34(1):40–6。
10.ポラードBA。 超音波誘導針によるターゲット位置特定を学習するための新しいモデル。 Reg Anesth Pain Med。 2008;33(4):360–2。
11. Tsui B、Dillane D、Pillay J、Walji A. 死体の超音波画像処理: 体幹の領域封鎖のための画像処理のトレーニング。 キャン・J・アナエス。 2008;55(2):105–11。
12. Xu D、アッバス S、チャン VW。 実践練習用の超音波ファントム。 Reg Anesth Pain Med。 2005;30(6):593–4。
13. van Geffen GJ、Mulder J、Gielen M、van Egmond J、Scheffer GJ、Bruhn J. ファントムを使用した超音波ガイド下介入タスクにおけるニードル ガイド デバイスをフリーハンド技術と比較。 麻酔。 2008;63(9):986–90。
14. ジョージア州ブルイン、ワシントン州シュミット。 超音波ガイド下注射の実行方法。 ベストプラクティス臨床リウマトール。 2009;23(2):269–79。
15. キーガン B. 擬人化ファントムとその方法。 米国特許出願 2005/0202381。 2005年。
16. Zhu Y、Magee D、Ratnalingam R、Kessel D. 超音波ガイド下針挿入手順のためのトレーニング システム。 Med Image Comput Comput Assist Interv. 2007;10(pt 1):566–74。
17. Magee D、Zhu Y、Ratnalingam R、Gardner P、Kessel D. 超音波ガイド下針留置トレーニング用の拡張現実シミュレーター。 Med Biol Eng Comput。 2007;45(10):957–67。
18. グルサミー KS、アガーワル R、パラニヴェル L、デイビッドソン BR。 腹腔鏡手術の外科研修医向けの仮想現実トレーニング。 コクラン データベース システム改訂版 2009;1:CD006575。
19. Grottke O、Ntouba A、Ullrich S、他。 局所麻酔トレーニング用の仮想現実ベースのシミュレーター。 Br J アネス。 2009;103(4):594–600。
20. Ullrich S、Grottke O、Fried E、他。 仮想患者アーキテクチャを備えた被験者間可変局所麻酔シミュレーター。 Int J Comput Assist Radiol Surg. 2009;4(6):561–70。
21. Galiano K、Obwegeser AA、Bale R、他。 超音波ガイドおよび CT ナビゲーション支援による歯根周囲および 椎間関節 腰椎および頸椎への注射:音響解剖学的パターンを認識するための新しい教育ツール。 Reg Anesth Pain Med。 2007;32(3):254–7。
22. Matveevskii AS、Gravenstein N. 麻酔研修医の選択、教育、および能力評価におけるシミュレーター、教育プログラム、および非技術的スキルの役割。 Jクリットケア。 2008;23(2):167–72。
23. Phelan MP、Emerman C、Peacock WF、Karafa M、Colburn N、Buchanan K. エコー増強針は、主に経験の浅い超音波ユーザーのグループの短軸超音波ガイド下血管アクセスのモデルでカニューレ挿入時間を短縮しますか? Int J Emerg Med. 2009;2(3):167–70。
24. ステッドマン RH. 米国麻酔科医協会のシミュレーション センターに対する全国承認プログラム。 Jクリットケア。 2008;23(2):203–6。
25. Friedman Z、Siddiqui N、Katznelson R、Devito I、Bould MD、Naik V. 短期および長期の学習曲線に対する硬膜外麻酔シミュレーションの臨床的影響: 高忠実度モデル トレーニングと低忠実度モデル トレーニング。 Reg Anesth Pain Med。 2009;34(3):229–32。
26. ジョージア州チャップマン、ジョンソンD、アーカンソー州ボーデンハム。 超音波検査による針の位置の可視化。 麻酔。 2006;61(2):148–58。
27. サイト BD、Brull R、Chan VW、他。 超音波ガイド下の局所麻酔に関連するアーチファクトと落とし穴エラー。 パート I: 超音波物理学と機械操作の基本原理を理解します。 Reg Anesth Pain Med。 2007;32(5):412–8。
28. シャファルター=ゾッポート I、マカロック CE、グレイ AT。 局所神経ブロックに使用される針の超音波可視化: in vitro 研究。 Reg Anesth Pain Med。 2004;29(5):480–8。
29. NAカンポス、JHチリ、アーカンソー州プランケット。 超音波ガイド下 冷凍アブレーション 慢性鼠径痛に対する生殖器大腿神経の治療。 痛みの専門医。 2009;12(6):997–1000。
30. Liang P、Gao Y、Wang Y、Yu X、Yu D、Dong B。18 ゲージ針と 21 ゲージ針を使用した米国ガイドによる脾臓の経皮針生検。 Jクリン超音波検査。 2007;35(9):477–82。
31. Chin KJ、Perlas A、Chan VW、Brull R. 超音波ガイド下の局所麻酔における針の視覚化: 課題と解決策。 Reg Anesth Pain Med。 2008;33(6):532–44。
32. Tsui BC、Doyle K、Chu K、Pillay J、Dillane D. 症例シリーズ: 104 日間の手手術患者における曲線プローブを使用した超音波ガイド下の鎖骨上ブロック。 キャン・J・アナエス。 2009;56(1):46–51。
33. ニコルズ K、ライト LB、スペンサー T、カルプ WC。 照射角度の変化による超音波エコー源性と針の視認性の変化。 J Vasc Interv Radiol. 2003;14(12):1553–7。
34. Deam RK、Kluger R、Barrington MJ、McCutcheon CA。 超音波末梢神経ブロックに使用する新しいエコー発生針の研究。 麻酔集中治療。 2007;35(4):582–6。
35. Simonetti F. 超音波誘導下での針生検のための誘導波技術。 Proc SPIE。 2009;7261:726118。
36. カルプ WC、マッコーワン TC、ゲルツェン TC、他。 標準針、ディンプル針、ポリマーコーティング針の相対的な超音波エコー発生性。 J Vasc Interv Radiol. 2000;11(3):351–8。
37. ペレラ RR、キンメ=スミス C、テスラー FN、ラガヴェンドラ N、グラント EG。 新しい電子的に強化された生検システム: 超音波検査ガイド下介入処置中の針先の視認性を向上させる価値。 AJRアム・J・レントゲノール。 1992;158(1):195–8。
38. クライン SM、フロンハイザー MP、リーチ J、ニールセン KC、スミス SW。 超音波誘導末梢神経ブロックを強化するための圧電振動針およびカテーテル。 麻酔肛門。 2007;105(6):1858–60。 目次。
39. Maecken T、Zenz M、Grau T. 局所麻酔用の針の超音波特性。 Reg Anesth Pain Med。 2007;32(5):440–7。
40. 高山 W、安村 隆、金子 哲 他超音波ガイド下末梢神経ブロック用の新型エコー発生針「八光式CCR」。 増井さん。 2009;58(4):503–7。
41. ダウド MI、レースフィールド JC。 の分散三次元シミュレーション Bモード 一次k空間法を用いた超音波イメージング。 物理医学生物。 2009;54(17):5173–92。
42. Bertolotto M、Perrone R、Bucci S、Zappetti R、Coss M. 従来の超音波とリアルタイムの比較 空間複合イメージング 重度のペイロニー病患者の評価において。 アクタ・ラジオル。 2008;49(5):596–601。
43. Cheung S、Rohling R. 超音波ガイド下経皮処置における針の視認性の向上。 超音波医学生物学。 2004;30(5):617–24。
44. Mesurolle B、Bining HJ、El Khoury M、Barhdadi A、Kao E. の寄稿 組織高調波イメージング インターベンショナル乳房超音波検査における周波数複合イメージング。 J超音波医学。 2006;25(7):845–55。
45. ブルル R、ペルラス A、チャン VW。 超音波ガイド下の末梢神経遮断。 Curr Pain Headache Rep. 2007;11(1):25–32。
46. Ricci S、Moro L、Antonel li Incalzi R. 腓腹神経の超音波画像化: 超音波解剖学と調査の理論的根拠。 Eur J Vasc Endovasc Surg. 2010;39(5):636–41。
47. イェン CL、ジェン CM、ヤン SS。 従来の超音波検査、リアルタイム空間複合超音波検査、組織高調波超音波検査、肝病変の組織高調波複合超音波検査を比較する利点。 クリンイメージング。 2008;32(1):11–5。
48. Cohnen M、Saleh A、Luthen R、Bode J、Modder U。リアルタイム複合イメージングを使用した経頸静脈肝門脈大循環ステントシャント手術中の肝硬変肝臓における超音波針の視認性の改善。 J Vasc Interv Radiol. 2003;14(1):103–6。
49. クレンデネン SR、リウトルト KT、ファイングラス NG、グリーングラス RA、ブルル SJ。 継続的な斜角筋間腕神経叢遮断のためのリアルタイム 2009 次元超音波。 J アネス。 23;3(466):8–XNUMX。
50. クァク・J、アンドリュース・M、ガービン・S、ダンブラ・ミネソタ3D 経食道心エコー検査: 最近の文献 2007 ~ 2009 年のレビュー。 Curr Opin 麻酔薬。 2010;23(1):80–8。
51. フレンチ JL、ニュージャージー州レイン・フェニング、ハードマン JG、ニューメキシコ州ベッドフォース。 超音波ガイド下血管アクセスの落とし穴: 2008/63 次元超音波の使用。 麻酔。 8;806(13):XNUMX–XNUMX。
52. ハンセン R、マソイ SE、ヨハンセン TF、アンヘルセン BA。 医療用超音波イメージングでデュアル周波数帯域送信パルス複合体を利用します。 J アコースティック ソック アム。 2010;127(1):579–87。
53. ハイセン・J、フェルウェイ医学博士。 医療診断トランスデューサーの非線形、広角、パルス音場を計算するための反復法。 J アコースティック ソック アム。 2010;127(1):33–44。
54. マルティネス=グラウレラ O、マーティン CJ、ゴドイ G、ウラーテ LG。 超音波イメージング用のフェルマースパイラルに基づいた 2D アレイ設計。 超音波。 2010;50(2):280–9。
55. フォスター FS、メヒ J、ルカックス M、他。 前臨床イメージング用の新しい 15 ~ 50 MHz アレイベースのマイクロ超音波スキャナー。 超音波医学生物学。 2009;35(10):1700–8。
56. ゲバウアー B、タイヒグレーバー UM、ヴェルク M、ベック A、ワーグナー HJ。 超音波検査ガイド下での静脈穿刺と、骨髄移植用のトンネル状大口径中心静脈カテーテルの X 線透視ガイド下での留置 - 高い成功率と低い合併症率。 サポートケアがん。 2008;16(8):897–904。
57. Phee SJ、Yang K. 切除不能肝腫瘍治療のための介入ナビゲーション システム。 Med Biol Eng Comput。 2010;48(2):103–11。
58. Vaithilingam S、Ma TJ、Furukawa Y 他2009次元CMUTアレイを用いた56次元光音響イメージング。 IEEE Trans Ultrason 強誘電体周波数制御。 11;2411(9):XNUMX–XNUMX。
59. Nelson BP、Melnick ER、Li J. 遠隔環境用のポータブル超音波、パート I: 現場展開の実現可能性。 J Emerg Med. 2010年(出版中)。
60. サイト BD、スペンス BC、ギャラガー J、他。 局所麻酔と超音波が融合し、移行期の専門分野となります。 Acta 麻酔スキャンド。 2008;52(4):456–66。
61. パルメリ ML、ダール JJ、マクラウド DB、グラント SA、ナイチンゲール KR。 音響放射力インパルスイメージングを使用した末梢神経イメージングの実現可能性について。 超音波画像診断。 2009;31(3):172–82。
62. Meir A、Rubinsky B. 分散ネットワーク、ワイヤレス、クラウド コンピューティングにより実現された 3D 超音波:新しい医療技術パラダイム。 PLoS ワン。 2009;4(11):e7974。
63. リングラルMG、ヴァシリエフNV、デルニドPJ、ハウRD。 3D 超音波画像における手術器具の統計的セグメンテーション。 超音波医学生物学。 2007;33(9):1428–37。
64. ボクターEM、チョティMA、バーデットEC、ウェブスターIII RJ。 三次元超音波ガイド下ロボット針留置: 実験的評価。 Int J Med ロボット。 2008;4(2):180–91。
65. Freschi C、Troia E、Ferrari V、Megali G、Pietrabissa A、Mosca F。拡張現実と人間とロボットの協調制御を使用した超音波誘導ロボット生検。 Conf Proc IEEE Eng Med Biol Soc. 2009;1:5110–3。
66. ウッド BJ、ロックリン JK、ヴィスワナサン A、他。 を指導するための技術 高周波アブレーション 将来のマルチモダリティ介入スイートで。 J Vasc Interv Radiol. 2007;18(1 pt 1):9–24。
67. 平岡 明、広岡 真、小泉 裕 他~に対する治療反応を判定するための改良された技術 高周波アブレーション USボリュームシステムを用いた肝細胞癌治療。 Oncol Rep. 2010;23(2):493–7。
68. Fredrickson M. 超音波ガイド下の大腿カテーテルの留置を容易にするための「斜め」の針とプローブの位置合わせ。 Reg Anesth Pain Med。 2008;33(4):383–4。
69. Phelan M、Hagerty D. 斜視図: 超音波ガイド下中心線配置の代替アプローチ。 J Emerg Med. 2009;37(4):403–8。
70. Phal PM、Brooks DM、Wolfe R. 局所病変の超音波検査ガイド生検: ファントムを使用したフリーハンド技術とプローブガイド技術の比較。 AJRアム・J・レントゲノール。 2005;184(5):1652–6。
71. Wang AZ、Zhang WX、Jiang W. ニードル ガイドは、超音波ガイド下神経ブロックにおけるニードルの通過の視覚化を容易にします。 J臨床麻酔。 2009;21(3):230–2。
72. ブオノコア E、スキッパー GJ。 操作可能なリアルタイム超音波検査ガイド針生検。 AJRアム・J・レントゲノール。 1981;136(2): 387–92。
73.ツイBC。 ポータブルレーザーユニットを使用して、超音波ビームに対する針の面内位置合わせを容易にします。 Reg Anesth Pain Med。 2007;32(1):84–8。
74. サイト BD、Brull R. 末梢局所麻酔における超音波ガイド: 哲学、証拠に基づいた医学、および技術。 Curr Opin 麻酔薬。 2006;19(6):630–9。
75. Wood BJ、Zhang H、Durrani A、他。 放射線治療のための電磁追跡によるナビゲーション: 実現可能性研究。 J Vasc Interv Radiol. 2005;16(4):493–505。
76. Levy EB、Tang J、Lindisch D、Glossop N、Banovac F、Cleary K. 正確な肝内穿刺針誘導のための電磁追跡システムの実装: in vitro モデルでの精度の結果。 アカド・ラジオル。 2007;14(3):344–54。
77. Krucker J、Xu S、Glossop N、他。 熱アブレーションおよび生検ガイダンスのための電磁追跡: 空間精度の臨床評価。 J Vasc Interv Radiol. 2007;18(9):1141–50。
78.グロソップND。 電磁追跡と比較した光学式の利点。 J 骨関節外科 Am. 2009;91(suppl 1):23–8。
79. Paltieli Y、Degani S、Zrayek A、他。 フリーハンドの産科超音波ガイド下手順のための新しいガイド システム。 超音波産科婦人科。 2002;19(3):269–73。
80. マーホーファー P、チャン VW。 超音波ガイド下の局所麻酔: 現在の概念と将来の傾向。 麻酔肛門。 2007;104(5):1265–9。
81. Molnar J. 局所麻酔システムとカート。 米国特許 2009275892、2009 年。
82. ヒッキー K、パラシャール A、サイト B、スペンス BC。 生体医学的な位置決めおよび安定化システム。 米国特許 2007129634、2007 年。
83.ツイBC。 超音波ガイド下末梢神経ブロックを実行するためのゲルの代替媒体としてのブドウ糖 5% 水溶液。 Reg Anesth Pain Med。 2009;34(5):525–7。
84. サイト BD、スペンス BC、ギャラガー JD、ビーチ ML。 超音波画面の端: 神経以外の病変を診断する局所麻酔科医。 Reg Anesth Pain Med。 2006;31(6):555–62。
85. ファウスト AM、フルニエ R. 超音波ガイド下の局所麻酔における針先の位置の代理マーカーとしてのカラー ドップラー。 Reg Anesth Pain Med。 2009;34(5):525。
86. Greenleaf JF、Urban MW、Chen S. せん断波分散超音波振動測定法 (SDUV) による組織の機械的特性の測定。 Conf Proc IEEE Eng Med Biol Soc. 2009;1:4411–4。
87. チョン・HH、チャ・SH、リー・KY、キム・TK、キム・JH。 超音波ガイド下経皮腎瘻造設術のための輸液技術。 心臓血管インターベントラジオール。 2005;28(1):77–9。
88. Bloc S、Ecoffey C、Dhonneur G. ハイドロローカリゼーション技術を使用した、超音波ガイド下の局所麻酔中の針先の進行の制御。 Reg Anesth Pain Med。 2008;33(4):382–3。
89. Tsui BC、Kropelin B. 単発末梢神経刺激に対する水中 5% ブドウ糖の電気生理学的効果。 麻酔肛門。 2005;100(6):1837–9。
90. ツイ BC、クロペリン B、ガナパシー S、フィヌカン B。水中デキストロース 5%: カテーテル留置を刺激する際に末梢神経の電気刺激を維持するための流体媒体。 Acta 麻酔スキャンド。 2005;49(10):1562–5。
91. Dhir S、Ganapathy S. 超音波誘導とコントラスト強調の使用: 連続鎖骨下腕神経叢アプローチの研究。 Acta 麻酔スキャンド。 2008;52(3):338–42。
92. スウェンソン JD、デイビス JJ、ドゥクー JA。 超音波ガイド下での連続斜角間ブロック留置後のカテーテルの位置を評価するための新しいアプローチ。 麻酔肛門。 2008;106(3):1015–6。
93. Kang E、Min HS、Lee J、他。 ガス発生ポリマーナノ粒子からのナノバブル: 生体の超音波イメージング。 Angew Chem Int Ed Engl. 2010;49(3):524–8。
94. Chantzi C、Saranteas T、Paraskeuopoulos T、Dimitriou V. 麻酔研修医の神経識別のための訓練方法としての超音波と経皮神経刺激装置の組み合わせ技術。 Reg Anesth Pain Med。 2007;32(4):365–6。
95. ディンジマンズ E、ウィリアムズ SR、アーカンド G、他。 超音波ガイド下鎖骨下ブロックにおける神経刺激:前向きランダム化試験。 麻酔肛門。 2007;104(5):1275–80。
96. Dufour E、Quennesson P、Van Robais AL、他。 膝窩坐骨神経ブロックに対する超音波と神経刺激の併用ガイダンス: 神経刺激単独との前向きランダム化比較。 麻酔肛門。 2008;106(5):1553–8。
97. Urbano J、Cannon M、Engle L. 統合された神経刺激装置と超音波画像装置。 米国特許 2008119737、2008 年。
98. デ・トラン QH、ムニョス L、ルッソ G、フィンレイソン RJ。 神経ブロックのための超音波検査と神経周囲カテーテルの刺激:証拠のレビュー。 キャン・J・アナエス。 2008;55(7):447–57。
99. ビーチ ML、サイト BD、ギャラガー JD。 神経刺激装置を使用しても、超音波ガイド下鎖骨上神経ブロックの有効性は改善されません。 J臨床麻酔。 2006;18(8):580–4。
100. Chan VW、Perlas A、McCartney CJ、Brull R、Xu D、Abbas S。超音波ガイドにより腋窩腕神経叢ブロックの成功率が向上します。 キャン・J・アナエス。 2007;54(3):176–82。
著者: ドミトリ・ソウザ、イマヌエル・レルマン、トーマス・M・ハラジンスキー