Aplicación de bloqueos nerviosos
Aplicación de bloqueos nerviosos Aplicación de asistente para el tratamiento del dolor
Aplicación de asistente para el tratamiento del dolor Aplicación POCUS
Aplicación POCUS Aplicación de acceso IV
Aplicación de acceso IV Aplicación MSK para la rodilla
Aplicación MSK para la rodilla Aplicación VetRA
Aplicación VetRA manual de bloqueo nervioso
manual de bloqueo nervioso Actualizaciones sobre anestesia regional
Actualizaciones sobre anestesia regional Manual de anestesiología
Manual de anestesiología Revisión de anestesiología
Revisión de anestesiología Actualizaciones de anestesia 2025
Actualizaciones de anestesia 2025 Actualizaciones de anestesia 2026
Actualizaciones de anestesia 2026 Actualizaciones sobre anestesia pediátrica
Actualizaciones sobre anestesia pediátrica Actualizaciones sobre el manejo de las vías respiratorias
Actualizaciones sobre el manejo de las vías respiratorias Manual estadounidense de tratamiento intervencionista del dolor
Manual estadounidense de tratamiento intervencionista del dolor Actualizaciones sobre medicina para el dolor
Actualizaciones sobre medicina para el dolor Dominar el acceso IV difícil
Dominar el acceso IV difícil Manual de enfermería de la UCPA
Manual de enfermería de la UCPA Manual Veterinario de RA
Manual Veterinario de RA Sobre Nosotros
Sobre Nosotros
El uso de la ecografía en los procedimientos de medicina del dolor intervencionista tiene muchas ventajas. La tecnología de ultrasonido actualmente está creciendo exponencialmente debido a sus muchas ventajas de imágenes de ultrasonido de alta resolución mejoradas y en tiempo real que resultan en intervenciones exitosas para el manejo del dolor. Además, el uso de ultrasonido para procedimientos intervencionistas de manejo del dolor evita los muchos riesgos asociados con la exposición a la radiación tanto para el paciente como para el médico. Con la capacitación y la experiencia adecuadas, se puede dominar el seguimiento confiable y compulsivo de un eje y una punta de aguja introducidos, ambos críticos para intervenciones efectivas y seguras de medicamentos contra el dolor. La falta de visualización de la aguja, especialmente la punta de la aguja, durante el avance de la aguja es uno de los errores más comunes en los procedimientos intervencionistas guiados por ultrasonido (UGIP). La manipulación de la posición de la aguja durante una intervención de control del dolor, la inyección de anestésicos locales/esteroides u otros medicamentos, los procedimientos de radiofrecuencia o crioablación y otras intervenciones sin una visualización adecuada de la punta de la aguja a menudo pueden provocar lesiones vasculares, neurales y viscerales no intencionales. Como ejemplo, la tasa de lesiones por punción vascular no intencional durante la colocación del bloqueo de nervio periférico se redujo del 40 % en las técnicas convencionales de referencia anatómica al 10 % con la introducción de la visualización en tiempo real del avance de la aguja de bloqueo regional bajo ultrasonido. Los alumnos a menudo pueden cometer errores repetidos y exhibir comportamientos técnicos y de seguridad potencialmente comprometedores durante los procedimientos de colocación de bloqueos nerviosos intervencionistas guiados por ultrasonido que pueden remediarse potencialmente mediante técnicas que pueden mejorar la visualización de la aguja. Un médico no puede suponer que una aguja de intervención/procedimiento siempre se identificará claramente en función de las propiedades y tamaños variables de las diversas agujas metálicas. La variedad de tipos de agujas utilizadas a menudo producirá una señal distinta o un "eco" debajo de la imagen de ultrasonido. La visualización efectiva de la aguja de procedimiento, una vez que se introduce debajo de la piel, es un desafío por varias razones: la variabilidad en la ecogenicidad de las agujas, las diferentes tecnologías de procesamiento de imágenes de la máquina de ultrasonido de muchos fabricantes de ultrasonido y la variabilidad de las propiedades de la sonda del transductor. Estas razones, junto con otros factores, pueden manipularse y modificarse para ayudar a mejorar la visibilidad de la aguja y se analizarán en este curso.
1. ENTRENAMIENTO Y SIMULACIÓN FANTASMA
Capacitación con tutoría adecuada
Un conocimiento adecuado de la anatomía humana y la capacidad de producir imágenes anatómicas transversales “típicas” durante la ecografía no suelen ser suficientes para una visualización adecuada de la aguja en todas las circunstancias. La capacidad de observar, en tiempo real, la colocación y el avance de la aguja junto con otras manipulaciones procedimentales bajo guía ecográfica puede ser una tarea desafiante tanto para el profesional experimentado como para el novato, ya que requiere un nuevo conjunto de habilidades. Sites et al. han demostrado que la manipulación simultánea de la aguja junto con el funcionamiento del dispositivo requiere una formación específica a pesar de otras tendencias a definir estrategias de formación sencillas para el uso de la ecografía por parte de no radiólogos. El Comité Conjunto de la Sociedad Americana de Anestesia Regional y Medicina del Dolor y la Sociedad Europea de Anestesia Regional y Terapia del Dolor sugirió que la visualización del paso de la aguja junto con la inyección de anestésico local es una de las cuatro categorías importantes de habilidades requeridas para la competencia en UGIP, que incluyen la comprensión del funcionamiento del dispositivo, la optimización de la imagen y la interpretación de la imagen (Figura 1).
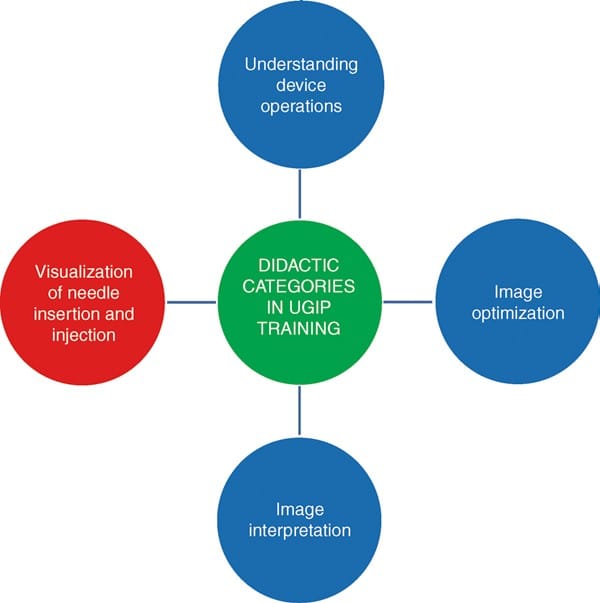
Fig. 1 Las principales categorías didácticas en la capacitación de la UGIP incluyen la visualización de la inserción de la aguja y la inyección de la solución anestésica local, la comprensión de las operaciones del dispositivo, además de la optimización e interpretación de imágenes. Procedimientos intervencionistas guiados por ecografía UGIP.
Para perfeccionar estas cuatro habilidades técnicas, el profesional debe recibir una formación adecuada que incluya un programa de educación médica continua bajo la supervisión y la instrucción de un mentor. Para seguir desarrollando las habilidades necesarias para dominar la ecografía Doppler guiada por imágenes (UGIP), también se recomienda realizar ecografías en uno mismo y en colegas, así como practicar con simuladores y maniquíes antes de realizar la UGIP en pacientes.
Phantoms
Se han identificado dos errores comunes durante la formación de la UGIP, y son
1. falta de visualización de la aguja de procedimiento durante el avance hacia su objetivo y
2. Movimiento de la sonda de ultrasonido sin una visualización adecuada de la aguja.
Un fantoma de ultrasonido es una herramienta de simulación que imita varias propiedades del tejido humano, incluyendo la textura táctil y la compresibilidad de la piel, además de la apariencia y sensación típicas de una aguja al ser introducida bajo ultrasonido. La simulación con fantoma para la punción guiada por ultrasonido (UGIP) también puede abordar importantes preocupaciones sobre la seguridad del paciente al mejorar las habilidades de manipulación de la aguja y desarrollar aún más la capacidad de visualización de la punta de la aguja, lo que aliviará muchos de los factores de estrés asociados con la práctica de la UGIP en pacientes. Practicar la visualización de la punta de la aguja guiada por ultrasonido en un simulador de fantoma comenzará a fomentar el desarrollo de las habilidades necesarias para la UGIP en un entorno menos estresante y de bajo riesgo.
Se han descrito diversas modalidades para lograr una apariencia “similar al tejido” de los fantomas de práctica para ultrasonido. Los fantomas se identifican típicamente por su “fidelidad”, que describe qué tan fielmente el fantoma puede replicar la textura precisa del tejido anatómico. Por ejemplo, un fantoma de alta fidelidad sería un espécimen de cadáver, y un fantoma de baja fidelidad estaría representado por un baño de agua. Los fantomas de baja fidelidad se han hecho de muchos materiales diferentes, incluidos globos de agua o baños de agua (Figura 2), tofu (Figura 3), gelatina o agar, o materiales fácilmente disponibles, como almohadillas de gel quirúrgico (Figura 4Se han descrito otros simuladores, como esponjas, queso, pollo, pavo, maniquíes porcinos y otros objetos. Estas estrategias reflejan un creciente interés en el desarrollo continuo de nuevas tecnologías de maniquíes de alta fidelidad.
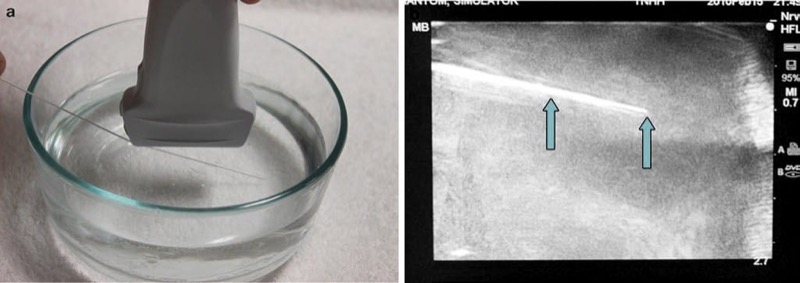
Fig. 2 Aspecto de la aguja en el maniquí de baño de agua (a, b). Este es un fantasma de baño de agua (a); la aguja (flechas) se visualiza fácilmente (b).
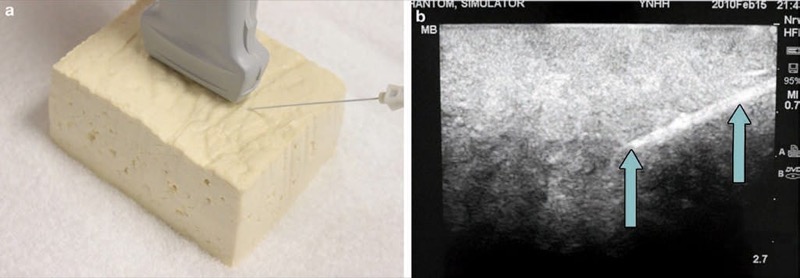
Fig. 3 Aspecto de la aguja en el fantasma de tofu (a, b). El tofu es un fantasma de ultrasonido de bajo costo Leyenda (a) donde la aguja (flechas) se visualiza fácilmente (b).
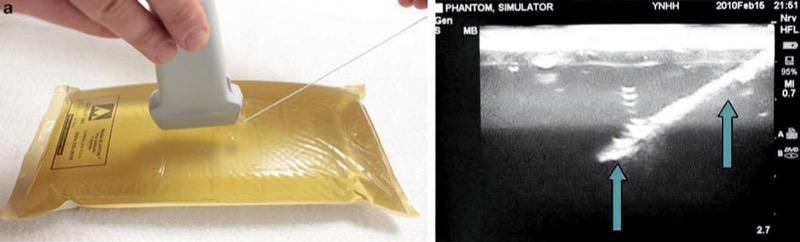
Fig. 4 Aspecto de la aguja en la almohadilla de gel quirúrgico (a, b). Este es un fantasma de almohadilla de gel quirúrgico (a). Aquí la aguja (flechas) se visualiza fácilmente (b).
Los fantomas de baja fidelidad tienen una durabilidad limitada y también pueden presentarse limitaciones en la fidelidad ecográfica. Más recientemente, la tecnología de simulación de fantasmas ha mejorado y los fantasmas pueden fabricarse con polímeros plásticos, poliuretano y otros materiales de vinilo. Como otro ejemplo, el Fantasma Azul (Figura 5) (Redmond, WA) y fantomas de laboratorios ATS (Bridgeport, CT) (Figura 6) aparecerán como "tejidos" en las imágenes de ultrasonido y también pueden incluir vasos, mientras que otros pueden incluir nervios fantasma o columna vertebral (Figura 7).
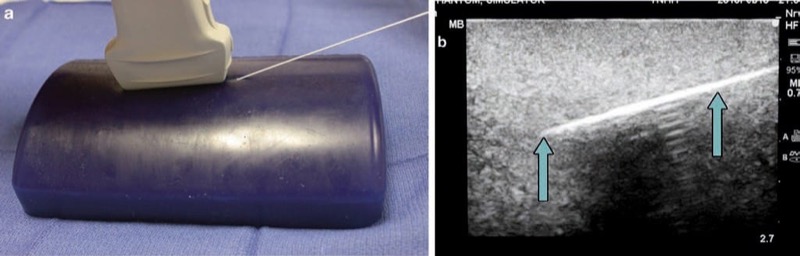
Fig. 5 Aspecto de la aguja en Blue Phantom (a, b). Blue Phantom es un fantoma de ultrasonido que incluye estructuras, nervios simulados y vasos (a). Aquí la aguja (flechas) se visualiza fácilmente (b).
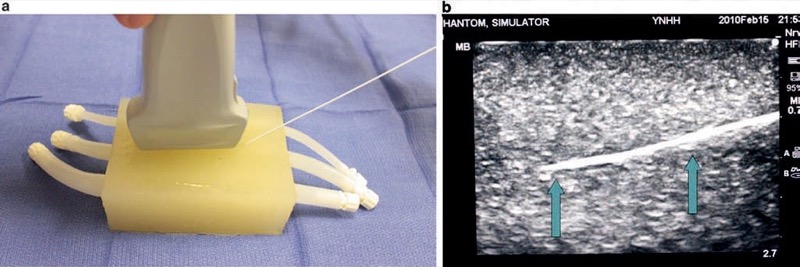
Fig. 6 Aspecto de la aguja en fantomas de laboratorio ATS (a, b). El fantasma ATS incorpora tubos de plástico que simulan embarcaciones (a). La aguja (flechas) se visualiza fácilmente (b).
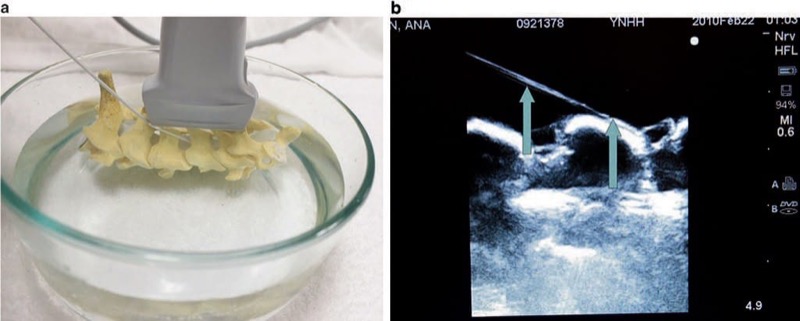
Fig. 7 Aspecto de la aguja en el simulador de fantoma de baño de agua de la columna cervical (a, b). Un baño de agua de la columna cervical y de la columna lumbar simulan las estructuras óseas de la columna. El panel (a) muestra un modelo de columna cervical en un baño de agua. El panel (b) muestra la columna cervical bajo ultrasonido con aguja (flechas) fácilmente visualizables.
2. SIMULACIÓN DE ALTA FIDELIDAD
El examen regional guiado por ecografía anestesia La herramienta interactiva (IT) de simulación fantasma (U-GRASP), un tipo más nuevo de simulador de ultrasonido, ha sido desarrollada por los autores para que los alumnos dominen su técnica de visualización de agujas (Figura 8El U-GRASP IT incluye un fantoma preciso que puede imitar el movimiento de las extremidades cuando se alcanza el objetivo guiado por ultrasonido y se logra una neuroestimulación exitosa. Además, el fantoma proporciona retroalimentación mediante un zumbador activador y un diodo emisor de luz que se ilumina cuando se ha realizado un bloqueo exitoso. El futuro de los fantomas de simulación continuará expandiéndose y posiblemente incluirá la evaluación de errores y habilidades en el avance dirigido de la aguja, y los datos también pueden usarse para calificar y monitorear el entrenamiento UGIP con énfasis en mejorar los resultados UGIP. Recientemente, se han desarrollado fantomas UGIP virtuales y 3D/4D similares a los que se utilizan en el entrenamiento quirúrgico.

Fig. 8 Herramienta interactiva (IT) de simulación de anestesia regional guiada por ecografía (U-GRASP). Este es un simulador de ultrasonido de alta fidelidad que permite documentar el desempeño del alumno en el posicionamiento de la aguja durante los procedimientos simulados. Además, proporciona al alumno una retroalimentación inmediata a través de una luz y un indicador de sonido que se activa a medida que se acerca la estructura anatómica objetivo con la punta de la aguja.
Algunas de las máquinas de ultrasonido para UGIP proporcionan herramientas multimedia para facilitar el aprendizaje de la UGIP. Los dispositivos permiten el uso del banco de imágenes y videos preestablecidos de procedimientos típicos y secciones transversales anatómicas que se pueden utilizar durante el procedimiento de elección para proporcionar un soporte de interpretación de imágenes y referencia disponible en tiempo real de alta calidad (Figura 9).

Fig. 9 Sistema de apoyo a la interpretación de imágenes y en tiempo real (eZONO). El dispositivo eZONO permite que el operador use un banco de imágenes y videos preestablecidos almacenados y secciones transversales anatómicas que se pueden usar durante el procedimiento de elección para proporcionar una referencia de alta calidad disponible en tiempo real y soporte de interpretación de imágenes. Usado con permiso de eZONO.
3. SIMULADORES FANTASMA COMBINADOS DE ULTRASONIDOS Y FLUOROSCÓPICOS
Muchos profesionales del dolor no están familiarizados con la UGIP y no tienen experiencia o tienen poco conocimiento de la visualización de la aguja por ultrasonido y las manipulaciones de la aguja bajo ultrasonido. Es muy probable que estas personas hayan aprendido y luego practicado la adquisición de habilidades de seguimiento de la aguja que se requieren para los muchos tipos diferentes de inyecciones (por ejemplo, columna cervical y lumbar) mediante la simulación simultánea de técnicas basadas en rayos X y un simulador de ultrasonido. Se descubrió que esta combinación era útil en la transición de las inyecciones asistidas por tomografía computarizada para el dolor lumbar al área en desarrollo de la UGIP. Sin embargo, los fantomas de ultrasonido de laboratorio anatómicos y animales de alta fidelidad se encuentran actualmente con mayor frecuencia en centros universitarios o en conferencias y seminarios especiales y no son ampliamente accesibles. Los autores han desarrollado un prototipo de un fantoma combinado de ultrasonido y fluoroscopia para inyecciones transforaminales cervicales. Está hecho de un modelo anatómico de columna cervical disponible comercialmente sumergido en un medio de polivinilo que simula ecográficamente el tejido humano. Además, este fantoma contiene examen anatómico y absorberá el tinte fluoroscópico si se inyecta por error (Figura 10). Fácil de reproducir, este sistema de simulación de alta fidelidad puede mejorar la competencia de los alumnos en la visualización de agujas durante la UGIP combinada guiada por ultrasonido y fluoroscópica.

Fig. 10 Fantoma combinado de ecografía y fluoroscopia para inyecciones transforaminales cervicales. Este fantasma contiene arterias vertebrales llenas de líquido anatómicamente correctas que exhiben flujo pulsado bajo el examen de ultrasonido Doppler y captarán el tinte fluoroscópico si se inyecta por error a través de la aguja del procedimiento. La imagen muestra el fantasma utilizado por un médico residente.
Existe un creciente conjunto de evidencia y beneficios comprobados para la mejora de las habilidades técnicas y prácticas al introducir la simulación de la localización de agujas durante la punción lumbar guiada por ecografía (UGIP) en cirugía, medicina de urgencias, radiología intervencionista y anestesiología. Para establecer la utilidad y la rentabilidad de los simuladores tecnológicamente avanzados, los estudios futuros deberán comparar modelos de alta fidelidad con modelos de menor fidelidad. Además, existen muchas otras especialidades médicas que han demostrado la ventaja de la simulación para mejorar la destreza manual, lo que puede traducirse en mejores resultados en los procedimientos. El campo de la medicina del dolor está avanzando rápidamente y sin duda se beneficiará de la incorporación de la simulación en la educación y la formación en esta área, lo que también puede proporcionar una estrategia de alto rendimiento para superar algunos de los desafíos de la visualización de agujas durante la UGIP.
4. AGUJA DE PROCEDIMIENTO: FACTORES DE VISIBILIDAD RELACIONADOS
Sonografía básica e interpretación de imágenes de aguja
Uno de los componentes importantes de un ecógrafo es el transductor de ultrasonido (también conocido como sonda o cabezal de exploración). Esta sonda transmite ondas sonoras que culminan en un haz acústico generado por un campo eléctrico alterno aplicado a pequeños cristales piezoeléctricos situados bajo la superficie del transductor. Las frecuencias típicas de las ondas sonoras utilizadas en la ecografía son muy altas, entre 3 y 15 MHz, de ahí el término ultrasonido. El haz de ultrasonido se dirige lejos de la superficie del transductor y puede penetrar en el tejido en distintos grados, según su composición. Un haz acústico puede penetrar músculos, tendones y otros tejidos blandos en diferentes grados, dependiendo de la densidad del tejido en particular; sin embargo, las ondas sonoras no pueden atravesar tejidos extremadamente densos como el hueso. Las ondas sonoras generadas en el tejido y a través de él se reflejan (en distintos grados) de vuelta al transductor. Por lo tanto, se obtiene una imagen de ultrasonido cuando el haz acústico transmitido por la sonda se refleja de vuelta al transductor. La sonda de ultrasonido no solo genera el haz de ultrasonido, sino que también recibe el eco, que transmite los datos a la consola y la pantalla para generar la imagen. Durante una intervención de ultrasonido guiada por imágenes (UGIP), la aguja insertada refleja las ondas sonoras hacia la sonda, la cual deforma los cristales piezoeléctricos del transductor para producir un pulso eléctrico o eco. El tiempo que tarda el haz acústico de ultrasonido en regresar a la sonda es proporcional a la profundidad de reflexión. Esta relación se conoce como el principio de pulso-eco y constituye la base para la visualización en tiempo real de la UGIP. Comprender los principios físicos básicos de la ecografía permitirá al profesional mejorar la visualización de la aguja durante la UGIP y es fundamental para realizar intervenciones seguras y eficaces.
5. IMPEDANCIA ACÚSTICA COMO BASE PARA LA VISUALIZACIÓN DE LA AGUJA DEL PROCEDIMIENTO
Otro aspecto esencial de la visualización de agujas en UGIP es comprender los factores que pueden cambiar o alterar la visibilidad de las imágenes de ultrasonido, como la impedancia acústica. La impedancia acústica de los tejidos corporales depende de la densidad del tejido y de la velocidad a la que viaja el haz de ultrasonido a través de ese medio en particular. Dependiendo del tejido corporal particular por el que viaje el haz de ultrasonido, la velocidad del sonido cambia y puede oscilar entre 1500 y 1600 m/s. Estas pequeñas variaciones en la velocidad del haz de ultrasonido son responsables de las variaciones en la intensidad o el brillo de la señal. Por ejemplo, una parte de la aguja de procedimiento que se ha colocado en un vaso lleno de líquido producirá una señal hiperecoica brillante porque hay una gran diferencia entre la impedancia acústica de cada una de las estructuras (aguja y líquido). Si hay marcadas diferencias en la impedancia acústica entre dos tipos de tejido diferentes, por ejemplo, entre los tejidos blandos del cuerpo y una aguja metálica o un hueso, la señal ecográfica de la aguja será más brillante o más hiperecoica. Esta diferencia de impedancia acústica entre una aguja y el tejido blando proporciona una base adicional para mejorar la visualización de la aguja.
6. TAMAÑO (CALIBRE) DE LA AGUJA DE PROCEDIMIENTO Y SU ECOGENICIDAD
Por lo general, una aguja de procedimiento de mayor calibre se visualiza más fácilmente bajo ultrasonido que una aguja de menor diámetro por dos razones importantes. En primer lugar, una aguja de calibre grande (G) tiene un área de superficie mayor que produce un cambio más significativo en la impedancia acústica que una aguja G más pequeña, y esto puede traducirse en una imagen más brillante en la pantalla de ultrasonido. En segundo lugar, la mayor área de superficie de una aguja de procedimiento G más grande puede interceptar el haz de ultrasonido y, en consecuencia, existe una mayor probabilidad de que el haz de ultrasonido se refleje hacia el transductor, produciendo así una señal más brillante que las agujas G más pequeñas (Figura 11Como resultado, se han recomendado agujas de mayor calibre apropiadas para procedimientos de manejo del dolor para mejorar la visibilidad de la aguja durante la UGIP. Sin embargo, debe recordarse que una aguja de procedimiento de mayor G puede estar asociada con mayor incomodidad para el paciente durante el paso de la aguja a través del tejido. Aunque durante un ensayo realizado por Campos et al. para tratar el dolor inguinal crónico, se utilizó una aguja de 14 G y una sonda de crioablación y se avanzó hacia el nervio genitofemoral que permitió una mejor visibilidad de la aguja bajo ultrasonido, la incomodidad del paciente se redujo con infiltración cutánea de anestesia local antes del paso de la aguja. La selección apropiada de la aguja de procedimiento G y la longitud de la aguja (que se discute más adelante en el capítulo) debe elegirse en función de la tarea de UGIP, y es importante señalar que una aguja de mayor G no se traduce necesariamente en una seguridad comprometida para el paciente. Como ejemplo, se encontró que la seguridad de las agujas de 21 y 18 G era la misma en un estudio de biopsia de bazo guiada por ultrasonido.
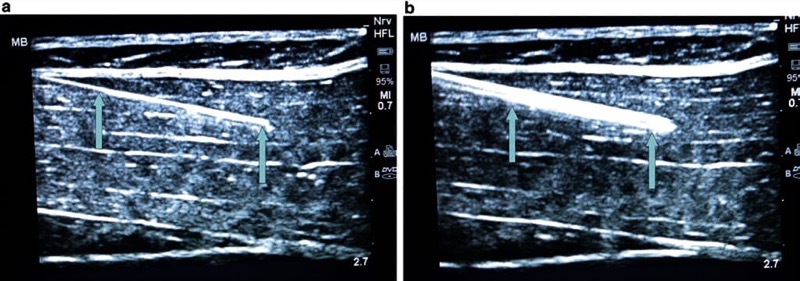
Fig. 11 Calibre (G) de la aguja y su visibilidad (a, b). Cuanto más grande es la aguja, mayor es la reflexión del haz de ultrasonido, lo que mejora la visualización de la aguja. El panel (a) muestra una aguja de 21 G (flechas), mientras que una aguja de 18 G (flechas) se muestra en el panel (b). Incluso un pequeño aumento en el tamaño de la aguja lo hace más visible. Fantasma porcino.
7. EL SITIO DE INSERCIÓN DE LA PIEL SELECCIONADO Y EL ÁNGULO DE PASO DE LA AGUJA DEL PROCEDIMIENTO
El ángulo y el sitio de inserción seleccionados de una aguja de procedimiento para la penetración/inserción inicial de la piel juegan un papel crítico en la optimización de la visualización de la aguja en una pantalla de ultrasonido. Una mala elección del sitio de inserción de la aguja y el ángulo de la aguja con respecto a la huella de la sonda de ultrasonido puede impedir una visualización óptima, clara y precisa de la aguja en la pantalla de ultrasonido. Este aspecto del entrenamiento conductual fue uno de los cinco patrones que comprometen la calidad identificados por Sites et al. durante el comportamiento de los aprendices de UGIP. Si el ángulo de inserción de la aguja de procedimiento es demasiado pronunciado o agudo en relación con la superficie de la huella de la sonda de ultrasonido, entonces una porción más pequeña o más corta del haz de ultrasonido se reflejará de vuelta desde la aguja al transductor, lo que resulta en una disminución de la visibilidad de la aguja (Figura 12). Un enfoque simple sugerido para superar este obstáculo es introducir la aguja de procedimiento con el ángulo de inserción más perpendicular posible a la superficie de huella de la sonda de ultrasonido/dirección del haz de ultrasonido. Para obtener la imagen ecográfica más óptima de una aguja de procedimiento, el haz de ultrasonido debe acercarse a la aguja y reflejarse de vuelta a la sonda de ultrasonido en un ángulo perpendicular (90°). Cuando el haz acústico de la sonda de ultrasonido y la aguja de procedimiento están en un ángulo de 90° entre sí, el transductor maximiza la recepción del haz de ultrasonido reflejado de la aguja. Una forma alternativa de posicionar la aguja de procedimiento y la sonda de ultrasonido lo más cerca posible de 90° entre sí es presionar o inclinar el extremo opuesto del transductor de ultrasonido utilizando la maniobra de "talón hacia adentro" (Figura 13).
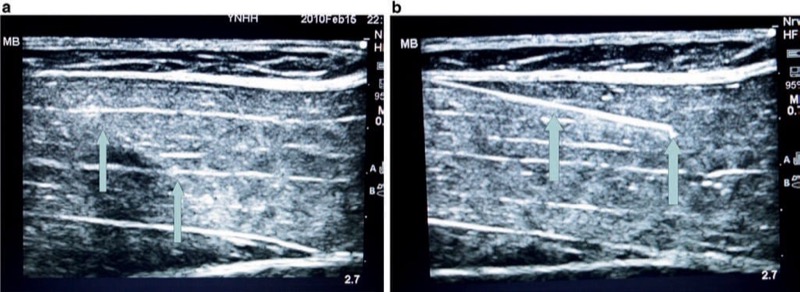
Fig. 12 El ángulo de inserción de la aguja y su visibilidad (a, b). Cuanto más pronunciado sea el ángulo de inserción de la aguja, menor será la reflexión del haz de ultrasonido, lo que empeorará la visualización de la aguja. El panel (a) muestra un ángulo de inserción más pronunciado, mientras que el panel (b) demuestra una mejor visibilidad de la misma aguja, insertada bajo un ángulo menor. Fantasma porcino.
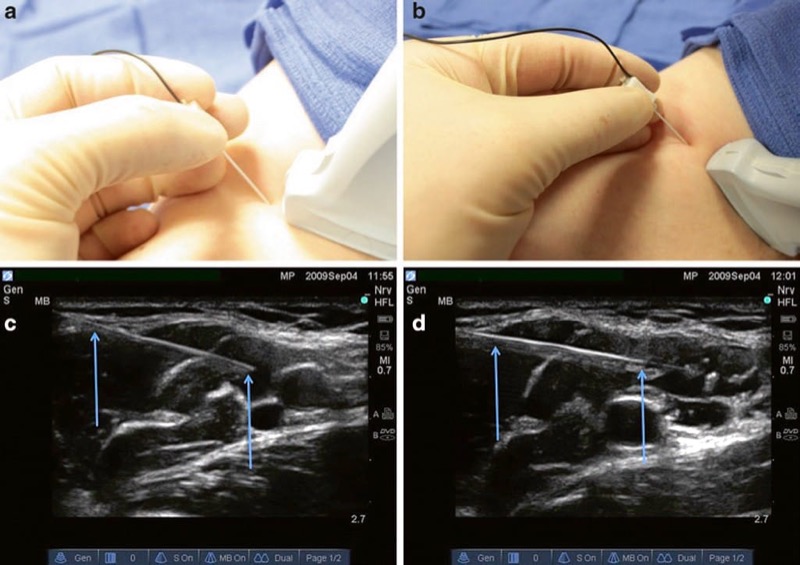
Fig. 13 Palpe el talón para cambiar el ángulo (a, b). La maniobra de talón hacia adentro aumenta el ángulo de incidencia de la sonda a la aguja mejorando el reflejo de la aguja y mejorando la visualización. El panel (a) demuestra un enfoque de sonda lineal en el plano. El panel (b) demuestra una maniobra de escora en el plano. El panel (c) demuestra la apariencia de la aguja (flechas) con el enfoque de sonda lineal en el plano. El panel (d) demuestra la apariencia de la aguja (flechas) con el talón en el plano en maniobra.
Muchos procedimientos de anestesia regional y UGIP se realizan con una sonda de ultrasonido de matriz lineal. Sin embargo, la sonda de matriz lineal puede producir molestias adicionales al paciente durante la maniobra de inclinación o de talón hacia adentro utilizada para obtener una orientación óptima de la aguja del procedimiento con respecto a la sonda de ultrasonido. Esta mayor sensibilidad a las manipulaciones de talón hacia adentro puede ser especialmente cierta para algunos pacientes con dolor crónico, y una posible solución a la preocupación de molestia de estos pacientes es el uso de una sonda de ultrasonido curvilínea. La sonda curvilínea permitirá una maniobra de talón hacia adentro relativamente indolora para casi todos los pacientes al tiempo que obtiene una excelente orientación de la aguja del procedimiento y de la sonda de ultrasonido y maximiza la visualización tanto del tejido como de la aguja del procedimiento (Figura 14). Sin embargo, debe recordarse que la sonda de ultrasonido curvilínea (más ideal para estructuras más profundas) no proporciona una imagen de exploración óptima para objetivos más superficiales como lo hace un transductor de ultrasonido de matriz lineal.
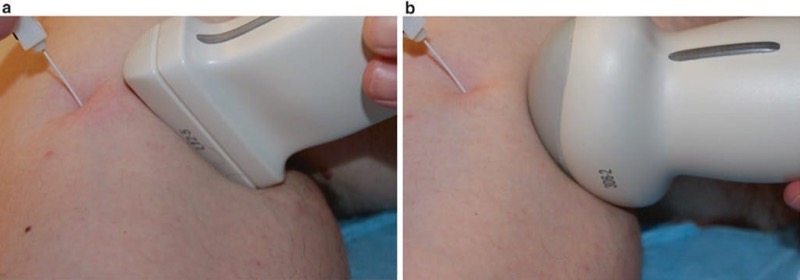
Fig. 14 Sonda curva vs. lineal (a, b). La maniobra de talón hacia adentro se mejora ergonómicamente con una sonda de ultrasonido curva y tiene la ventaja adicional de causar menos molestias al paciente. El panel (a) muestra la maniobra de talón hacia adentro con una sonda lineal. El panel (b) muestra la maniobra de talón hacia adentro con una sonda curva.
El ángulo óptimo para la inserción de la aguja en la superficie cutánea se sitúa entre 30° y 45°. En diversas situaciones clínicas, puede resultar difícil alcanzar este ángulo óptimo, por lo que se han diseñado agujas ecogénicas para superar estas dificultades (la imposibilidad de obtener ángulos más adecuados). Estas agujas ecogénicas pueden visualizarse con ángulos de inserción pequeños o pronunciados, de tan solo 15° a 30°, gracias a sus propiedades ecogénicas especiales.
8. AGUJAS DE PROCEDIMIENTO ECOGÉNICO
Cuando se obtienen imágenes correctamente, casi cualquier aguja de procedimiento generará una imagen de ultrasonido o devolverá un eco bajo la exploración de ultrasonido. Sin embargo, las agujas han sido diseñadas y fabricadas con propiedades especiales para usarse junto con ultrasonido que mejorarán y optimizarán la calidad de su imagen de ultrasonido y se han denominado agujas de procedimiento ecogénicas. Muchos avances recientes han proporcionado propiedades adicionales en la tecnología de agujas que mejorarán la ecogenicidad de las agujas. Se han creado pequeñas hendiduras o muescas en ángulo en el eje de la aguja, lo que da como resultado una superficie irregular de la aguja de procedimiento que aumentará la dispersión de las ondas de ultrasonido. Teóricamente, la superficie irregular o con muescas de la aguja del procedimiento proporcionará una señal más brillante y una imagen de ultrasonido más clara en ángulos variables de inserción de la aguja en la piel (Figura 15Un mayor número de muescas o hendiduras en el vástago de la aguja de procedimiento puede mejorar su visualización en la pantalla de ultrasonido. Sin embargo, a medida que aumenta el número de muescas, también aumenta la rugosidad del vástago, lo que puede generar mayor fricción en la interfaz aguja-tejido. Esta fricción puede dificultar los movimientos suaves de la aguja, necesarios durante un bloqueo nervioso, y puede resultar contraproducente o causar molestias adicionales al paciente.
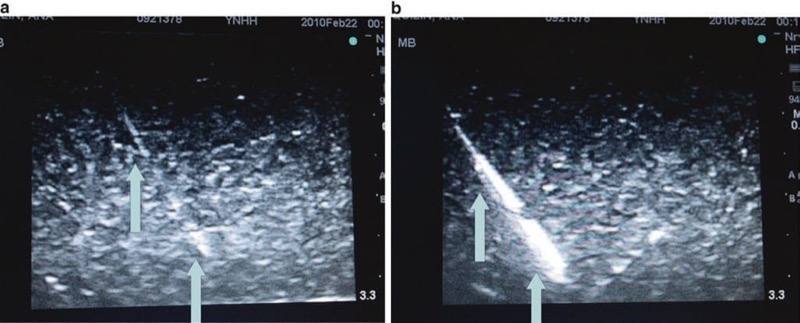
Fig. 15 La sangría mejora la reflexión de los ultrasonidos (a, b). Esta aguja ecogénica tiene una hendidura en el eje de la aguja que mejora la reflexión del haz de ultrasonido en ángulos de inserción más variables. El panel (a) muestra una aguja genérica no ecogénica (flechas) en un ángulo agudo de incidencia. El panel (b) muestra una aguja ecogénica ranurada (flechas) en un ángulo agudo de incidencia con visibilidad mejorada (Pajunk, EE. UU.). fantasma azul.
La aguja de procedimiento recubierta de polímero es otro avance tecnológico que mejora la ecogenicidad de la aguja. Un recubrimiento polimérico especial de la aguja, tratado con un agente espumante, crea microburbujas en la superficie del vástago de la aguja durante la inserción y el paso de la misma. Por lo tanto, a medida que la aguja de procedimiento avanza dentro y a través de los tejidos, se crea un aumento en la impedancia acústica entre la interfaz tejido-aguja, y esta medida puede mejorar la ecogenicidad de la aguja y la calidad de la imagen de ultrasonido (Figura 16). Además, cuando se utilizan agujas recubiertas de polímero durante la estimulación nerviosa y los procedimientos de localización de nervios específicos, la capa de polímero aplicada al eje de la aguja del procedimiento sirve como aislante para la estimulación eléctrica y minimiza la estimulación de los tejidos alrededor del eje de la aguja del procedimiento. La combinación de los avances tecnológicos descritos anteriormente en el diseño de agujas de procedimiento (muescas y recubrimiento polimérico) ha creado una base para el desarrollo de las agujas ecogénicas modernas actualmente disponibles en el mercado (Figura 17Actualmente se están desarrollando otras innovaciones de ingeniería para mejorar la visibilidad de la aguja en la urodiafragmática. Uno de estos enfoques más recientes consiste en la instalación de un generador de baja frecuencia en el extremo de la aguja, en el lado opuesto a la punta. Este generador produce vibraciones de gran amplitud a lo largo del vástago de la aguja, lo que la hace más visible en la ecografía. La eficacia de este y otros diseños de agujas prometedores se encuentra actualmente en investigación.
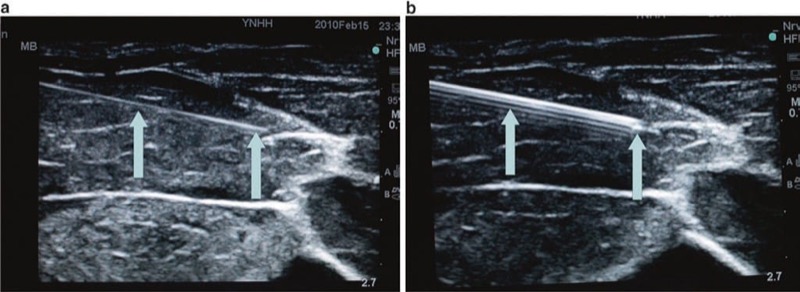
Fig. 16 Aguja recubierta de polímero vs. no ecogénica (a, b). Una aguja ecogénica recubierta de polímero en comparación con una aguja no ecogénica. El panel (a) muestra una aguja no ecogénica de 21 G (flechas). El panel (b) muestra una aguja ecogénica recubierta de polímero de 21 G (flechas). Fantasma porcino.
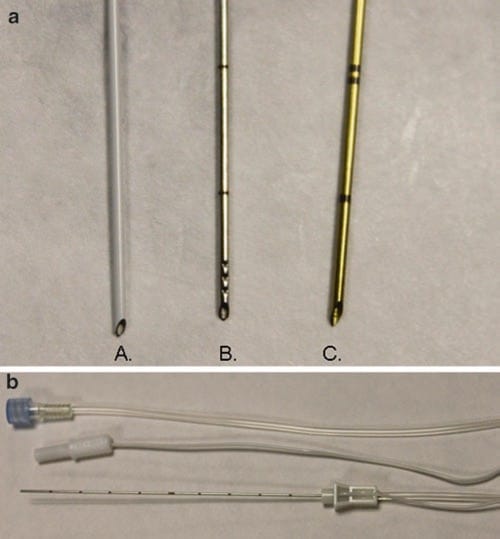
Fig. 17 Aguja con muescas, cubierta con polímero (a, b). Se trata de muestras de agujas de neuroestimulación con recubrimiento polimérico combinado y muescas en el eje que mejoran aún más la ecogenicidad de la aguja y la visualización posterior. Panel (a) A Braun, B Havels, C agujas Pajunk. Panel (b), una muestra de la aguja ecogénica con propiedades de neuroestimulación (B Braun).
Un estudio de Phelan et al. que comparó agujas ecogénicas con agujas estándar no ecogénicas no mostró ninguna mejora objetiva y medible en el rendimiento de la UGIP durante el abordaje de eje corto para procedimientos intervencionistas. Una posible desventaja de una aguja ecogénica brillante es el potencial aumento de sombras no deseadas de la aguja en la imagen de ultrasonido, así como otros artefactos. Para reducir los artefactos creados por el cuerpo de la aguja y mejorar aún más la visualización de la punta durante la UGIP, las nuevas tecnologías se centran en el desarrollo de mejoras en la visibilidad de la punta de la aguja en lugar de en todo el cuerpo de la aguja.
9. PROCEDIMIENTO PUNTA DE LA AGUJA
La visualización precisa de la punta de la aguja en la técnica UGIP es fundamental para minimizar o evitar lesiones vasculares o inyecciones accidentales, así como otras complicaciones relacionadas con el daño a nervios y tejidos causado por las agujas utilizadas en el procedimiento. Recientemente, Sites et al. demostraron que el error más común de los residentes durante la técnica UGIP se produce al avanzar la aguja sin mantener la visualización de la punta en la pantalla del ecógrafo. Otros errores frecuentes son la visualización inadecuada de la aguja y la identificación incorrecta de la punta durante las inyecciones intramusculares, lo que se ha identificado como uno de los cinco patrones de comportamiento de los residentes que comprometen la calidad durante las técnicas UGIP.
El bisel de la punta de la aguja del procedimiento generalmente dispersará el haz de ultrasonido debido a la irregularidad de la superficie de la punta de la aguja en comparación con el eje de la aguja y también debido al ángulo menos pronunciado de la punta de la aguja en comparación con el eje proximal de la aguja. Fue secundario a la comprensión de que la posición del bisel de la aguja del procedimiento mejoró la visualización de la punta de la aguja de la imagen de ultrasonido que introdujo el desarrollo de agujas ecogénicas de eje ranurado (Fig.18Se han desarrollado otros avances tecnológicos adicionales para mejorar la visibilidad de la punta de la aguja y la calidad de la imagen ecográfica. Un transductor-receptor especial colocado en la punta de la aguja mejoró significativamente la visualización de la punta en un estudio. El sensor colocado en la punta de la aguja estaba hecho de un polímero piezoeléctrico que detectaba ondas de ultrasonido y las convertía en una señal eléctrica que se transmitía de vuelta al receptor de la sonda de ultrasonido para ayudar a la calidad de la imagen del posicionamiento de la punta de la aguja. Desafortunadamente, este dispositivo de diseño de punta de aguja con transductor-receptor falló en 4 de 16 pacientes y no se ha utilizado ampliamente. Sin embargo, se han desarrollado otros prototipos nuevos de diseños avanzados de agujas piezoeléctricas. La colocación de un actuador piezoeléctrico en una aguja Tuohy aislada personalizada de 18 G ha permitido una mejor visualización de la punta distal de la aguja en un estudio reciente.
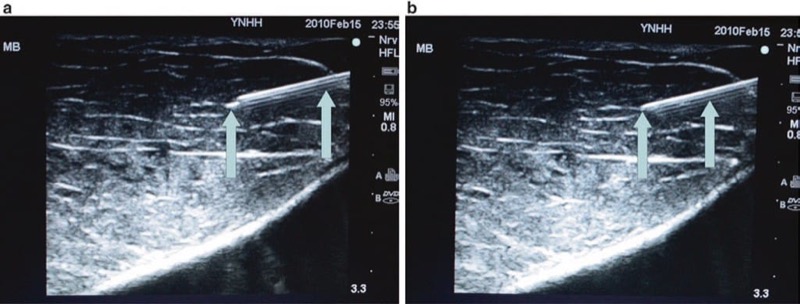
Fig. 18 Bisel hacia arriba frente a bisel hacia abajo o bisel al costado (a, b). La posición de bisel hacia arriba proporciona una mejor visualización de la punta de la aguja porque el haz de ultrasonido se refleja al máximo en esta posición. El panel (a) muestra una punta de aguja brillante cuando la aguja está en la posición de bisel hacia arriba (flecha). El panel (b) muestra exactamente la misma aguja girada a la posición de biselado hacia abajo y demuestra una peor visualización de la punta de la aguja (flecha).
También se ha logrado una ecogenicidad marcada y aumentada creando abolladuras o irregularidades más grandes solo en la punta de la aguja y respetando el eje de la aguja del procedimiento. La colocación o incorporación de estas muescas en las puntas de las agujas de procedimiento se crea de una manera similar a la del diseño para la tecnología de agujas de mayor textura descrita anteriormente. Estas agujas de procedimiento de punta con muescas actúan para resaltar la ecogenicidad de la punta de la aguja del resto del eje de la aguja y, como resultado, la punta de la aguja es más visible en las imágenes de ultrasonido (Figura 19).

Fig. 19 Punta ecogénica. Esta aguja de punta ecogénica Havels utiliza ranuras en la punta de la aguja para mejorar la ecogenicidad de la punta de la aguja. El panel (a) muestra la aguja de Havels con ranuras en la punta distal de la aguja. El panel (b) muestra la punta de la aguja altamente ecogénica dentro de un maniquí de ultrasonido (flecha). fantasma azul.
Para una aguja ideal para bloqueos nerviosos y técnicas UGIP, es fundamental contar con un diseño de imagen superior en la punta y una buena visibilidad del cuerpo de la aguja. Otro factor primordial para una aguja UGIP ideal es su versatilidad. La aguja UGIP debe ser apta para todo tipo de tejido, visualizarse fácilmente desde cualquier ángulo, mantener una imagen nítida del borde, generar pocos artefactos sin sombras y poseer características que permitan una buena detección y diferenciación de los tejidos y estructuras circundantes. Muchas de las agujas ecogénicas utilizadas actualmente aún distan mucho de un diseño ecogénico ideal. Sin embargo, los recientes avances tecnológicos están reduciendo rápidamente la brecha entre el diseño actual de la aguja ecogénica y la aguja ecogénica ideal para su uso en anestesia regional y procedimientos UGIP.
10. EL DISPOSITIVO DE ULTRASONIDO Y LA VISIBILIDAD DE LA AGUJA DEL PROCEDIMIENTO
Artefactos de imágenes de ultrasonido y visibilidad de la aguja del procedimiento
La visualización de la aguja mediante ecografía depende no solo de las propiedades de la aguja utilizada, sino también de la tecnología y las capacidades del transductor y del ecógrafo. La resolución de la imagen obtenida durante un examen ecográfico depende de la densidad del cristal piezoeléctrico del cabezal de exploración, su tipo de cristal y las propiedades del receptor del transductor. La resolución de la imagen ecográfica también depende de la potencia del procesador de imágenes del ecógrafo. Los avances en los transductores y en la tecnología de procesamiento de imágenes siguen facilitando la visualización de la aguja; sin embargo, es fundamental que el profesional conozca los posibles artefactos en la imagen de la aguja y adquiera experiencia en su interpretación.
Los artefactos sonográficos relacionados con la adquisición y el procesamiento de la imagen por una máquina de ultrasonido pueden afectar tanto las estructuras del tejido como la visibilidad de la aguja del procedimiento de varias maneras. En algunos casos, un objetivo hiperecoico puede parecer hipoecoico o anecoico cuando las ondas sonoras de ultrasonido que regresan se degradan, lo que puede ser un efecto de la desalineación del haz acústico y se denomina anisotropía. La anisotropía puede ser secundaria a la reflexión y/o refracción aberrantes (descritos a continuación) y permanece independiente de la desalineación del haz acústico del operador. La reflexión de una superficie lisa, como una aguja de procedimiento, se denomina reflexión especular. La reflexión de una superficie irregular puede causar la dispersión del haz de ultrasonido con la consiguiente degradación de la señal de ultrasonido recibida, lo que se denomina dispersión (Figura 20). La dispersión puede provocar la degradación de la imagen y artefactos; sin embargo, la dispersión se puede utilizar con ventaja con las agujas de procedimiento ecogénicas desarrolladas más recientemente. Cuando múltiples superficies reflejan un haz acústico de ultrasonido entre sí y el transductor de ultrasonido, se denomina reverberación (Figura 21). Si las ondas de sonido de ultrasonido se desvían de la trayectoria del incidente y luego se reflejan desde una estructura más profunda, se denomina refracción. La atenuación es otro factor que puede causar la degradación del haz acústico de ultrasonido. La atenuación se describe como una disminución en la intensidad o amplitud de la señal de ultrasonido a medida que pasa a través de ciertos tipos de tejido y puede ser causada por muchos de los factores mencionados anteriormente, incluidos la reflexión, la refracción y la dispersión. Los efectos aditivos o distorsionadores de la atenuación, los reflejos aberrantes y, en menor medida, con la refracción pueden distorsionar la imagen de ultrasonido que se muestra y provocar una incapacidad para identificar correctamente tanto la aguja del procedimiento como las estructuras anatómicas circundantes, así como la proximidad de la aguja a otras estructuras tisulares.
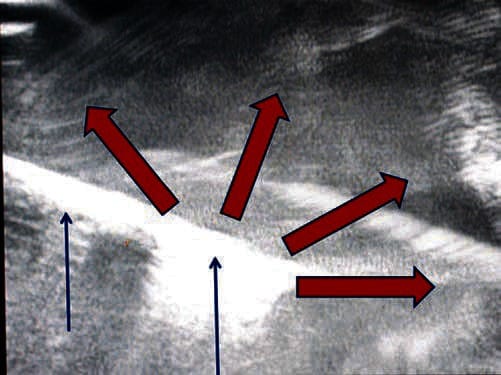
Fig. 20 La dispersión reduce la visibilidad de la aguja. La dispersión de la aguja puede disminuir la visualización de la aguja. Las flechas rojas representan la dispersión del haz de ultrasonido, que puede causar artefactos y empeorar la visualización de la aguja (flechas azules). Aquí la aguja se inserta en un baño de agua.
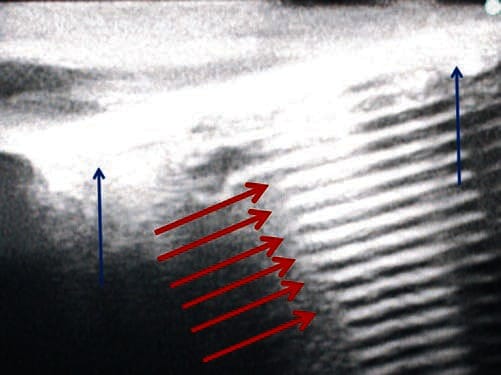
Fig. 21 La reverberación reduce la visibilidad de la aguja. La reverberación puede hacer que la aguja se refleje en las estructuras inferiores y puede afectar la visualización de la aguja. Aquí la aguja (flechas azules) se coloca en un fantasma de almohadilla de gel quirúrgico y hay un artefacto claro denominado reverberación (flechas rojas). Fantasma de gel quirúrgico.
11. IMPACTO DE DISTINTOS MODOS SONOGRAFICOS EN LA VISIBILIDAD DE LA AGUJA DEL PROCEDIMIENTO
Reconstrucción de imágenes espaciales y de frecuencia compuestas siguiendo la dirección de haz acústico y frecuencia variable
Una solución comúnmente utilizada para superar el problema de la desviación creada por una señal de ultrasonido reflejada desde una aguja de procedimiento es utilizar un sistema ecográfico de dirección de haz que permite la producción de imágenes espaciales compuestas. Los sistemas de ultrasonido de dirección de haz esencialmente dirigen el haz acústico reflejado lejos de la aguja de procedimiento de regreso a la sonda de ultrasonido alterando el ángulo de incidencia del haz de ultrasonido interno ( Las sondas de ultrasonido más antiguas se limitan a la dirección mecánica, pero los equipos de ultrasonido modernos, con transductores de banda ancha, cuentan con funciones específicas que permiten modificar el enfoque de transmisión. Los transductores de banda ancha permiten que la sonda genere y reciba señales de ultrasonido en diferentes ángulos de forma automática, lo que produce una imagen ecográfica de mayor calidad.
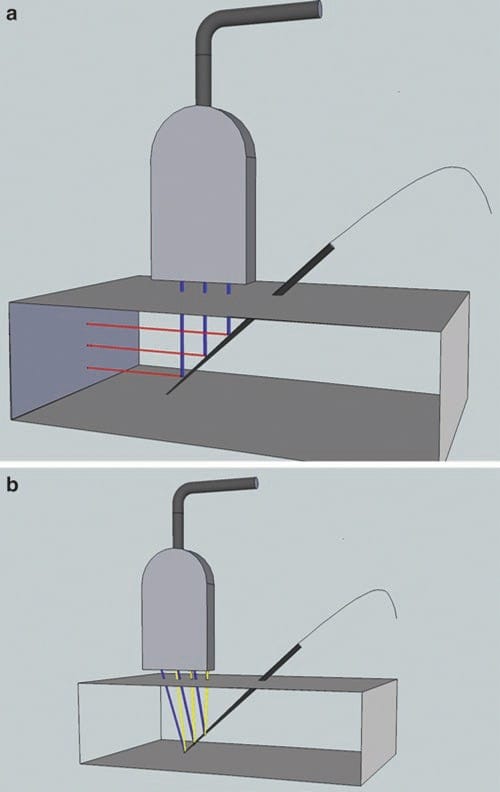
Fig. 22 La dirección del haz puede mejorar la visibilidad de la aguja. La dirección del haz mejora la visualización de la aguja al aumentar el ángulo de incidencia entre la sonda y la aguja y, por lo tanto, aumenta la visibilidad de la aguja. En el panel (a), el haz no se dirige hacia la aguja y se reflejan menos haces de ultrasonido en azul, en rojo, de regreso al transductor. En el panel (b), los haces de ultrasonido en azul se dirigen hacia la aguja y se reflejan en amarillo.
La obtención de imágenes espaciales compuestas se logra mediante un proceso computacional. Este proceso se realiza mediante la dirección mecánica del haz, que combina tres o más fotogramas obtenidos desde diferentes ángulos de dirección en un solo fotograma. La obtención de imágenes espaciales compuestas permite una mayor claridad, resolución y una mejor definición del contorno de la aguja durante el procedimiento.
La ecografía de frecuencia compuesta obtiene exploraciones de varias frecuencias diferentes, lo que produce patrones de artefactos de moteado variables en cada fotograma. Los fotogramas resultantes se promedian, lo que reduce el moteado y la apariencia granulada que se observa en la ecografía convencional. El resultado es una imagen ecográfica anatómica mejorada de las estructuras tisulares, pero no una mejora en la calidad de la imagen de la aguja de punción.
12. FRECUENCIA DE LA SONDA DE ULTRASONIDO (PROFUNDIDAD) POTENCIA ACÚSTICA Y GANANCIA
La sonda de ultrasonido más utilizada durante la UGIP es un transductor de frecuencia de 5 a 10 MHz. Esta frecuencia específica del cabezal de exploración de ultrasonido proporciona una buena resolución espacial para nervios y plexos nerviosos a una profundidad de 1 a 5 cm. Una sonda de ultrasonido de menor frecuencia, de 2 a 5 MHz, se utiliza a menudo para visualizar estructuras nerviosas y de plexos nerviosos más profundas. Sin embargo, la resolución tanto de las estructuras anatómicas como de la aguja de procedimiento disminuye a medida que aumenta la profundidad y se utilizan transductores de ultrasonido de menor frecuencia. La sonda de ultrasonido de mayor frecuencia, con transductores de hasta 18 MHz, se utiliza con mayor frecuencia para intervenciones en las estructuras más superficiales, como los nervios de la mano y el antebrazo. Los controles del dispositivo de ultrasonido, que permiten ajustar la profundidad, la potencia acústica y la ganancia, ofrecen la opción de enfocar el haz de ultrasonido a un nivel óptimo y proporcionar una imagen de ultrasonido mejorada. Sin embargo, este potencial de ajuste del ecógrafo puede tener un impacto limitado en la visibilidad de la aguja de procedimiento, más allá de la optimización habitual de la imagen ecográfica.
13. COMPENSACIÓN DE GANANCIA DE TIEMPO E IMÁGENES ARMÓNICAS
Las opciones de control de compensación de ganancia de tiempo en una máquina de ultrasonido permitirán ajustar el brillo de la imagen a profundidades variables. Además, los cambios y ajustes realizados en la compensación de ganancia pueden minimizar muchos de los artefactos sonográficos producidos cuando el haz acústico de ultrasonido viaja a través de la piel y otras capas superficiales. La opción de control de compensación de ganancia de tiempo no solo puede reducir el ruido producido por los artefactos del tejido, sino que también puede reducir los artefactos de la señal principal de la aguja del procedimiento.
Otra función de los dispositivos de ultrasonido más modernos es la imagen armónica. Esta función permite suprimir la reverberación y otros tipos de ruido producidos por la piel y las paredes corporales. La tecnología de imagen armónica se basa en la comprensión de que los tejidos corporales producen una señal armónica débil pero útil que puede ser detectada y amplificada por la unidad de ultrasonido. La capacidad de imagen armónica utiliza estas señales armónicas detectadas y aplica ruido de baja frecuencia y alta amplitud para mejorar la imagen de ultrasonido. Los informes sobre la visualización de agujas en procedimientos mediante imagen armónica son variados, desde imágenes de ultrasonido superiores hasta imágenes de agujas consideradas inferiores en comparación con un dispositivo de ultrasonido convencional sin capacidad de imagen armónica. El impacto del nuevo tipo de imagen armónica, las técnicas de banda ancha, aún está por explorarse.
14. MODOS DE BRILLO, MOVIMIENTO Y DOPPLER
El modo B convencional (B significa brillo) sirve como la modalidad de dispositivo ecográfico en escala de grises que se usa actualmente, que generalmente se usa cuando se realiza UGIP. Las máquinas de ultrasonido en modo M (M stand of motion) se utilizan para evaluar el movimiento de las estructuras dentro del cuerpo. Por lo general, las máquinas de ultrasonido modernas muestran la imagen en modo M junto a una versión más pequeña de la imagen en modo B original en la pantalla. Cuando se utilizan dispositivos de ultrasonido 2D, el modo M se enfoca en la estructura objetivo y mostrará su movimiento a lo largo del tiempo en forma de una línea ondulante que se altera de acuerdo con las estructuras de tejido en movimiento. El modo M tiene un uso limitado durante la UGIP y no afecta ni mejora la visibilidad de la aguja del procedimiento.
Una tercera modalidad de imagen equipada en las modernas máquinas de ultrasonido es el modo Doppler, compuesto por la sensibilidad Doppler y el Doppler de potencia. La capacidad del modo Doppler puede diferenciar el flujo sanguíneo en los vasos sanguíneos de otras estructuras tisulares de aspecto similar y puede utilizarse para evitar teóricamente la penetración no intencionada del vaso o el traumatismo por una aguja de procedimiento, ya que se puede identificar el vaso sanguíneo (Figura 23). Las capacidades de Doppler también se pueden usar para mejorar la calidad y claridad de las imágenes de la aguja del procedimiento junto con otros métodos y herramientas descritos en la sección "mejora".
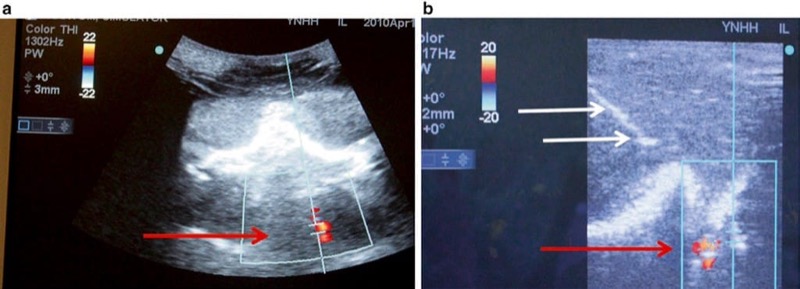
Fig. 23 El Doppler puede ayudar a prevenir la penetración involuntaria de un vaso o la inyección intravascular (a, b). El uso de Doppler puede ayudar en la visualización de los vasos que se deben evitar al someterse a procedimientos guiados por ultrasonido. El panel (a) muestra la detección de flujo sanguíneo con Doppler en la arteria vertebral (flecha roja) a nivel de la columna cervical C7 en decúbito prono. El panel (b) muestra una aguja (flechas blancas) que evita el vaso previamente identificado (flecha roja) en la ecografía Doppler en una posición lateral. Fantoma combinado de ultrasonido y fluoroscopia para inyecciones transforaminales cervicales
15. IMAGEN ULTRASONICA 3D Y 4D
La ecografía 2D típica captura y muestra una imagen plana en dos planos, análoga o similar a la fluoroscopia actual. La tecnología de ultrasonido 3D captura imágenes en múltiples planos y ángulos diferentes. La imagen resultante se puede mostrar en una representación o esquema tridimensional de las estructuras exploradas. Clendenen et al. describen las ventajas de la ecografía 3D estática al comparar las diferencias entre la radiografía simple (análoga a la ecografía 2D) y la tomografía computarizada convencional (análoga a la ecografía 3D estática). La ecografía 3D en tiempo real (3D dinámica, también conocida como 4D) añade el tiempo como un cuarto eje a las dimensiones tradicionales X, Y y Z. La ecografía 3D dinámica (4D) permite el seguimiento en tiempo real de una intervención, comparable a las tecnologías de TC o RM en tiempo real, pero con niveles de simplicidad, seguridad y coste difíciles de comparar. La tecnología de ultrasonido 4D actual presenta limitaciones relacionadas con la exploración y la visibilidad de intervenciones superficiales, debido a las mismas limitaciones asociadas a la frecuencia de la sonda de ultrasonido 3D. Sin embargo, recientemente hemos sido testigos de mejoras significativas en la tecnología de ultrasonido y prevemos que dicha tecnología seguirá mejorando rápidamente.
Inicialmente, la ecografía 3D se producía mediante el movimiento manual de la sonda ecográfica 2D convencional sobre la piel. Esta maniobra iba seguida de un procedimiento de reconstrucción similar al utilizado en la tomografía computarizada, pero engorroso y que requería mucho tiempo. A pesar de la introducción de transductores 2D especiales equipados con un receptor giratorio dentro de la sonda ecográfica, que proporcionan excelentes imágenes 3D biplanares y multiplanares, la reproducción de la imagen es estática y no se visualiza en tiempo real. Con la ecografía 4D, existe un pequeño pero perceptible retraso en la imagen 3D en tiempo real de la aguja del procedimiento. Además, no se han reportado beneficios evidentes en términos de una mejor visualización de la aguja del procedimiento con los transductores ecográficos 2D especiales, y estos transductores resultan engorrosos para los procedimientos de UGIP.
Las limitaciones tecnológicas actuales de los transductores de ultrasonido 3D se derivan de la dificultad de producir sondas de ultrasonido pequeñas y maniobrables que sean capaces de albergar la maquinaria mecánica de escaneo necesaria y avanzada (Figura 24). Sin embargo, el seguimiento en tiempo real de las agujas del procedimiento con este tipo de transductores de ultrasonido podría ser potencialmente superior a las imágenes producidas por las tecnologías ecográficas actuales, especialmente en manos experimentadas (Figura 25).

Fig. 24 Ultrasonido de aguja 3D y visibilidad de la aguja. Esta es una sonda de ultrasonido 3D. Actualmente, las sondas de ultrasonido 3D son más grandes que sus contrapartes 2D. Sin embargo, se están desarrollando sondas de ultrasonido 3D más nuevas y más pequeñas.
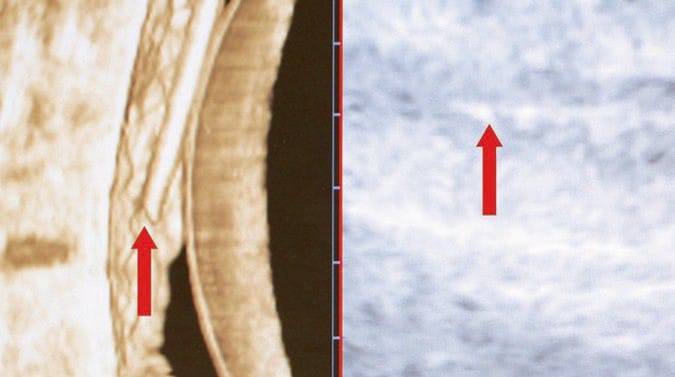
Fig. 25 Imagen 3D de la aguja en el fantasma. Aquí, una aguja se visualiza dentro de un fantoma de ultrasonido bajo ultrasonido 3D en tiempo real, también llamado ultrasonido 4D. La aguja se visualiza claramente en 3D a la izquierda (flecha roja izquierda) y es menos visible bajo ultrasonido convencional a la derecha (flecha roja derecha).
Otro avance reciente en la tecnología de ultrasonido 3D es el transductor de matriz. La creación de imágenes de ultrasonido 3D y 4D se ha desarrollado independientemente de la sonda de ultrasonido de matriz de dirección mecánica mediante el uso de un transductor de matriz. Estas sondas son más pequeñas y ligeras, y presentan perfiles ergonómicos mejorados. El desarrollo de los transductores de ultrasonido de matriz ha dado como resultado transductores más pequeños, a la vez que aumenta la velocidad de adquisición y procesamiento de datos aproximadamente tres veces más rápido que un transductor de ultrasonido de matriz de dirección mecánica convencional. Esto se traduce en una verdadera experiencia 4D y podría conducir a una mejor maniobrabilidad del transductor y visualización de la aguja durante el procedimiento.
16. AVANCES RECIENTES EN IMÁGENES POR ULTRASONIDO Y VISIBILIDAD DE LA AGUJA DE PROCEDIMIENTO
El procesamiento complejo de señales, los transductores de banda ancha, el mayor ancho de banda del escáner, el software actualizable y otros avances tecnológicos recientes han permitido mejoras en la calidad de la imagen ecográfica. El aumento de la frecuencia del haz de ultrasonido de los sistemas ecográficos hasta 50 MHz podría mejorar la calidad de la imagen, especialmente cuando las estructuras objetivo de la UGIP son superficiales o durante la UGIP en pacientes pediátricos. La combinación de ultrasonido con otras tecnologías de imagen, como la fluoroscopia, la tomografía computarizada y la resonancia magnética, puede representar una estrategia eficaz para una mejor localización de las agujas de procedimiento durante una intervención de UGIP. Uno de los sistemas de imagen dual más recientes que se están desarrollando actualmente combina la imagen fotoacústica con la ecográfica. Estos avances, junto con otras tecnologías de imagen ecográfica, se encuentran en transición de la investigación a la posible implementación clínica, y aún no se ha determinado el impacto de estas tecnologías en la visibilidad de las agujas de procedimiento.
Para obtener una visibilidad óptima de la imagen ecográfica durante el procedimiento con aguja, es fundamental adquirir destreza manual, aplicar tecnologías de ultrasonido avanzadas y mantener una práctica experta en la manipulación de la aguja y el transductor. Las tecnologías de optimización automática de la imagen ecográfica, desarrolladas e integradas en los ecógrafos modernos, contribuyen a mejorar la visualización de la aguja durante el procedimiento. Estas tecnologías permiten al profesional elegir entre modos preestablecidos optimizados para visualizar tejidos y estructuras específicas, como vasos sanguíneos, músculos, mama, entre otros. Los recientes avances en la detección de bordes ecográficos han dado lugar a una tecnología capaz de identificar y marcar automáticamente con colores nervios (amarillo), músculos (marrón), arterias (rojo) y venas (azul), y que probablemente estará disponible próximamente.
La incorporación de sistemas UGIP a la red de Internet puede proporcionar beneficios clínicos específicos al permitir consultas en línea en tiempo real por especialistas en manejo del dolor, sugerencias para la mejora de la imagen de la estructura objetivo, asistencia para la visualización de la aguja del procedimiento y confirmación por parte de ecografistas experimentados. Sin embargo, la optimización de la imagen de las estructuras objetivo ecográficas no proporciona automáticamente una visibilidad adecuada de la aguja del procedimiento. A pesar de los numerosos avances tecnológicos en imágenes ecográficas, estos no siempre se han traducido en una mejor visualización de la aguja del procedimiento. Una posible explicación de la disociación entre la optimización de la imagen ecográfica de la estructura objetivo y los avances en la mejora de la visualización de la aguja del procedimiento es que la aplicación tradicional de la ecografía en medicina se centra típicamente en la obtención de imágenes y el diagnóstico. Si bien se siguen realizando esfuerzos para mejorar los sistemas ecográficos de modo que puedan ajustarse para permitir que los instrumentos intervencionistas y las agujas de procedimiento produzcan una visibilidad más óptima bajo imágenes ecográficas, lamentablemente, dichos sistemas generalmente se han limitado a mejorar la visualización ecográfica de instrumentos quirúrgicos o unidades de imágenes asistidas por computadora y al desarrollo de sistemas robóticos para UGIP. Los avances en la tecnología de ultrasonido y la mejora en el desarrollo de agujas para procedimientos de UGIP parecen estar algo desconectados, posiblemente debido a la estrecha especialización de los fabricantes de agujas y ecógrafos. Sin embargo, esta brecha se ha reducido recientemente gracias al creciente número de agujas mejoradas para procedimientos de UGIP que se están desarrollando en diversas áreas de la medicina. Se han producido avances en el desarrollo de tecnología que puede disminuir los artefactos ecográficos producidos por el gas de la ablación por radiofrecuencia y los generados durante las intervenciones asociadas con la crioablación, que siguen siendo relevantes para el tratamiento del dolor.
Existen razones para creer que se está llevando a cabo una coordinación de esfuerzos entre fabricantes de agujas y equipos ecográficos para mejorar la visibilidad de la aguja en las intervenciones de dolor gastrointestinal superior (DGI). Es probable que estos esfuerzos de desarrollo se traduzcan en una colaboración con tecnología ecográfica diseñada específicamente para el creciente campo de la medicina intervencionista del dolor, lo que podría representar un nicho prometedor, práctico, científico y comercial para la especialidad. El problema actual, que sigue siendo crucial, es la necesidad de desarrollar tecnología que mejore la alineación precisa y consistente de la aguja con el transductor de ultrasonido. Este sigue siendo uno de los aspectos importantes de la DGI y la medicina intervencionista del dolor que, si se domina, permitirá, en última instancia, un procedimiento intervencionista exitoso para el paciente.
17. ALINEACIÓN AGUJA-SONDA
Necesidad de alineación de la aguja del procedimiento y la sonda de ultrasonido
Un ancho de haz de ultrasonido típico que se emite desde una sonda de ultrasonido es solo de aproximadamente 1 mm (Figura 26Por lo tanto, la visualización de una aguja de procedimiento puede resultar complicada debido a la desalineación del haz de ultrasonido y la aguja durante la anestesia regional y los procedimientos UGIP realizados en el plano. La aguja puede desviarse con relativa facilidad del haz de ultrasonido, por lo que es fundamental extremar la precaución, ya que incluso pequeños movimientos de la sonda o la aguja pueden provocar la pérdida de la imagen de la aguja en la pantalla. La imposibilidad de mantener la imagen de la aguja puede prolongar el tiempo del procedimiento o aumentar la tasa de complicaciones debido a daños tisulares y estructurales involuntarios. Por consiguiente, la visualización ecográfica precisa de la aguja es crucial, y el posicionamiento, avance y manipulación cuidadosos de la aguja con respecto a la sonda de ultrasonido son de vital importancia.
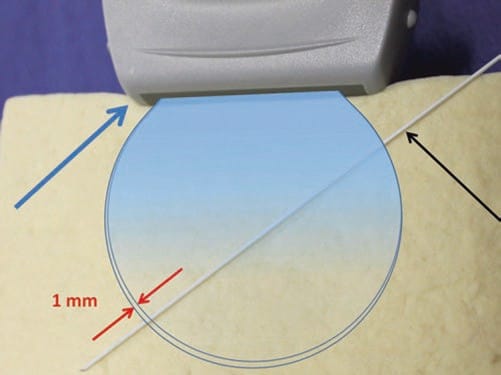
Fig. 26 La necesidad de alineación. La sonda de ultrasonido (flecha azul) emite un haz muy estrecho (forma redondeada) de cerca de 1 mm de ancho (flechas rojas) que se ensancha con la distancia de la sonda. Esta pequeña área puede dificultar la visualización de la aguja (flecha negra) si está desalineada. Fantasma de tofu.
18. ENFOQUE DE AGUJA “EN EL PLANO” Y “FUERA DEL PLANO”: INTERPOSICIONES CLÁSICAS DE SONDA-AGUJA
Se han sugerido varias estrategias para la visualización y obtención de imágenes por ultrasonido de la aguja del procedimiento, sin embargo, existen dos técnicas clásicas conocidas como el enfoque "en el plano" (IP) y la huella de la sonda "fuera del plano". El enfoque IP se basa en un concepto de visualización de la aguja del procedimiento como una línea brillante hiperecoica. El enfoque OOP se logra insertando la aguja debajo de la línea media (generalmente) y perpendicular a la huella de la sonda de ultrasonido en un eje corto al haz de ultrasonido donde la punta/eje de la aguja aparece como un punto hiperecoico brillante (Figura 27).
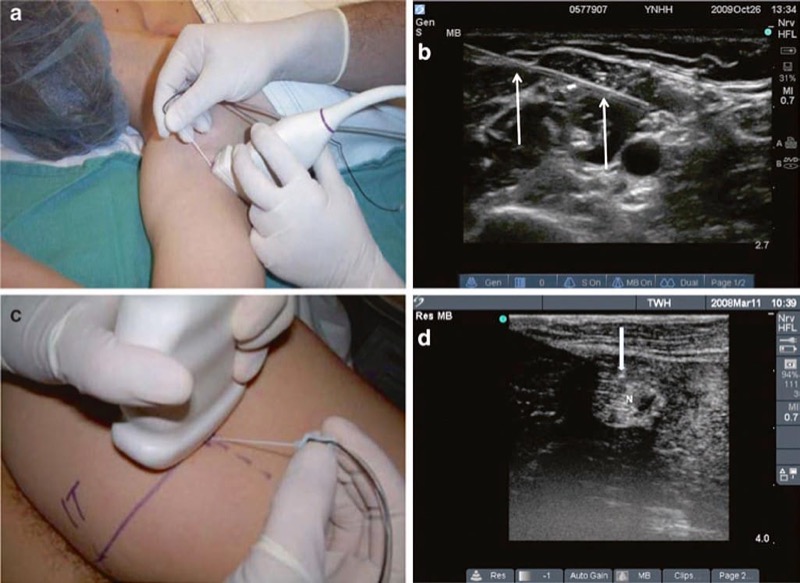
Fig. 27 Técnicas en el plano (IP) y fuera del plano (OOP). Esta es la técnica en el plano. La aguja se mantiene insertada paralela a la sonda (a) y se ve (flechas blancas) en el eje largo en la ecografía (b). La técnica fuera del plano se demuestra en el panel (c). El enfoque fuera del plano se logra insertando la aguja en el eje corto del haz y, por lo tanto, la punta de la aguja (flecha blanca) aparece como un punto hiperecoico brillante (d). N nervio ciático por encima de la fosa poplítea.
Una desventaja identificada del enfoque IP, frecuentemente citada, es que la aguja del procedimiento puede desviarse más fácilmente del haz de ultrasonido estrecho, lo que puede provocar complicaciones y prolongar el tiempo del procedimiento de bloqueo si no se puede visualizar la aguja durante toda la intervención de control del dolor. Otra posible desventaja del enfoque IP es la reverberación asociada, generada por el eje longitudinal del vástago de la aguja, que puede dificultar la detección de estructuras situadas debajo del vástago de la aguja. Una desventaja del enfoque OOP es la dificultad para seguir con precisión la aguja del procedimiento hasta el objetivo seleccionado. Otra complicación asociada a la técnica OOP es la falta de certeza o la imposibilidad de confirmar si el punto hiperecogénico observado en la imagen de ultrasonido corresponde a la punta de la aguja del procedimiento o al vástago de la aguja. Un aspecto importante a considerar al comparar o seleccionar entre las dos técnicas (IP u OOP) es que el enfoque IP requiere una longitud de inserción de aguja dos o tres veces mayor para alcanzar el objetivo deseado en comparación con el enfoque OOP, además del potencial de generar mayor incomodidad para el paciente. Es evidente que tanto el abordaje intraperitoneal (IP) como el fuera de la bolsa periodontal (OOP) presentan ciertas desventajas al realizar anestesia regional y procedimientos de dolor gastrointestinal superior (UGIP). Por lo tanto, es necesario adquirir experiencia con ambos abordajes para seleccionar la técnica más adecuada para cada procedimiento. Como alternativa adicional, el abordaje en plano oblicuo es otra técnica que puede considerarse al seleccionar el manejo del dolor guiado por ultrasonido, con el fin de minimizar o eliminar algunas de las desventajas de ambos abordajes para la visualización de la aguja.
19. ENFOQUE CON AGUJA PLANA OBLICUA PARA EL MANEJO DEL DOLOR GUIADO POR ULTRASONIDO
El abordaje en plano oblicuo se logra visualizando las estructuras anatómicas objetivo (incluidos nervios y vasos) en el eje corto y colocando la aguja del procedimiento en el eje largo de la sonda de ultrasonido. Este abordaje permite al operador obtener una visión óptima del objetivo subyacente y las estructuras circundantes mientras mantiene una visualización continua de la aguja del procedimiento y el vástago de la aguja durante el movimiento y la manipulación (Figura 28Se ha comprobado que el abordaje en plano oblicuo es útil en ciertos procedimientos donde el nervio objetivo puede ser tradicionalmente difícil de visualizar. Por ejemplo, el nervio femoral (lateral e inferior a la arteria femoral) suele tener una forma engrosada al estar encajado entre el músculo ilíaco y la fascia hiperecogénica, lo que puede provocar cierta obstrucción de la visión ecográfica óptima. El abordaje oblicuo a menudo conserva las ventajas de la técnica OOP, a la vez que permite una visión más clara del vástago y la punta de la aguja durante su avance.
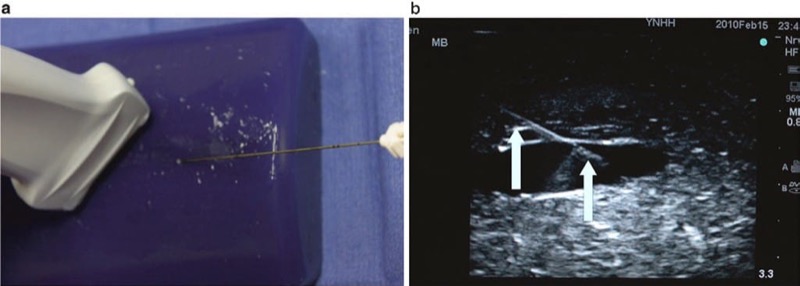
Fig. 28 La técnica del plano oblicuo (a, b). El enfoque de plano oblicuo se logra observando la vista de eje corto para visualizar las estructuras anatómicas de destino, incluidos los nervios y los vasos, pero coloca la aguja en el eje largo de la sonda. El panel (a) muestra el posicionamiento de la aguja y la sonda para la vista oblicua. El panel (b) muestra la imagen de la aguja (flechas) en la ecografía en la vista oblicua. fantasma azul.
20. ENFOQUE DE IMÁGENES CON AGUJA BIPLANE PARA EL MANEJO DEL DOLOR GUIADO POR ULTRASONIDO
Algunos ecógrafos 2D y máquinas con capacidad 3D permiten combinar imágenes en diferentes planos (en tiempo real) en la misma pantalla. Esto permite al profesional observar simultáneamente las estructuras anatómicas y la aguja en dos o más planos. Por ejemplo, un vaso sanguíneo puede visualizarse en su eje longitudinal o transversal al mismo tiempo en una pantalla dividida. Para la ecografía 2D se utiliza un transductor biplano, mientras que las sondas 3D generan imágenes multiplanares. Ambas técnicas de imagen, biplanares y multiplanares, tienen un gran potencial para mejorar la visualización de la aguja y los procedimientos UGIP, pero dado que la tecnología es relativamente nueva, su utilidad aún no se ha establecido. Sin embargo, es improbable que las capacidades de imagen biplanares reemplacen las técnicas fundamentales de alineación de la aguja y el transductor, que mejoran considerablemente la visibilidad de la punta y el vástago de la aguja.
21. GUÍAS DE AGUJA PARA PROCEDIMIENTOS MECÁNICOS Y ÓPTICOS
La importancia de la alineación de la aguja del procedimiento con el haz de la sonda de ultrasonido ha impulsado la consideración y el desarrollo de varios tipos de guías para la estabilización de la aguja y para la dirección de la trayectoria de la aguja. Estas guías de aguja de procedimiento están diseñadas para alinear y sincronizar la aguja con la posición de la sonda del transductor de ultrasonido y esencialmente mantienen la trayectoria de la aguja bajo el haz de ultrasonido. Se han descrito varios tipos de guías de aguja para procedimientos, como la guía de aguja mecánica, que es un dispositivo conectado directamente a la sonda de ultrasonido y que se usa para alinear la aguja de procedimiento de modo que su trayectoria permanezca bajo el haz de ultrasonido. Dichos dispositivos de guía de aguja para procedimientos están diseñados para coincidir con tipos específicos de sondas de ultrasonido y con la intención de que, a medida que avanza la aguja para procedimientos, se dirija en un camino bajo el haz de ultrasonidos (Figura 29Inicialmente, este tipo de dispositivos guía se introdujeron en la práctica clínica para la realización de biopsias, facilitando así los procedimientos realizados por profesionales con menos experiencia. Los dispositivos de guía ecográfica desarrollados para la aguja se mencionan con frecuencia en la literatura, ya que describen técnicas para optimizar la visualización de la aguja mediante ecografía en anestesia regional.
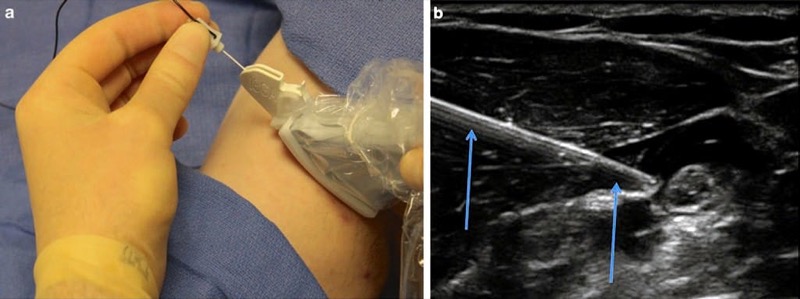
Fig. 29 Guías de aguja mecánicas (a, b). Las guías de aguja mecánicas pueden mejorar significativamente la visibilidad de la aguja al estabilizar tanto el transductor como la aguja. El panel (a) muestra la guía de aguja mecánica CIVCO. El panel (b) muestra la aguja (flechas) bajo guía mecánica.
Se ha demostrado que la guía mecánica de la aguja reduce significativamente (2×) el tiempo necesario para realizar procedimientos UGIP de forma segura. El uso de estos dispositivos también ha demostrado una visualización superior de la aguja cuando residentes sin experiencia realizaron procedimientos UGIP simulados en modelos porcinos. La visibilidad de la aguja resultó ser aproximadamente un 30 % mejor con el uso de dispositivos de guía mecánica de la aguja, y los residentes calificaron su satisfacción con estos dispositivos como significativamente mejor que con las técnicas a mano alzada. Sin embargo, la realización rutinaria de UGIP generalmente requiere ajustes frecuentes en la dirección de la aguja, lo que podría ser una desventaja potencial de un dispositivo de guía mecánica rígido. Puede no ser fácil lograr una visualización óptima del tejido circundante, las estructuras nerviosas objetivo y la dirección de la aguja con el uso de un dispositivo de guía mecánica rígido, ya que a menudo es necesario realizar ajustes dinámicos de la aguja durante el UGIP. Por lo tanto, el papel de los dispositivos de guía mecánica rígidos para facilitar la visualización de la aguja durante las intervenciones y procedimientos de manejo del dolor aún no está determinado.
Se han desarrollado y probado dispositivos mecánicos ajustables de guía de aguja para superar las desventajas de los dispositivos mecánicos rígidos. Varios tipos de dispositivos mecánicos para guiar las agujas de procedimiento han creado una base e impulsado la producción de sistemas UGIP guiados por robot. Sin embargo, las aplicaciones prácticas de los enfoques guiados por robot para UGIP actualmente parecen ser limitadas. Tsui desarrolló y describió una posible solución para las deficiencias de los diversos dispositivos de guía de aguja mediante un dispositivo basado en un sistema láser. El dispositivo de guía láser está diseñado para facilitar la alineación de la aguja UGIP y la sonda de ultrasonido. Esta guía óptica de aguja de procedimiento está compuesta por un haz láser que permite un fácil ajuste de la posición de la aguja de procedimiento según sea necesario (Figura 30Se ha determinado que esta guía óptica para agujas proporciona una referencia visual inequívoca de la alineación precisa entre la aguja y el haz láser, por lo que puede ser útil para la enseñanza y el desarrollo de la coordinación bimanual en los alumnos. Generalmente, se requieren agujas más largas al usar este dispositivo láser, ya que una mayor parte del vástago de la aguja debe sobresalir de la piel durante el procedimiento UGIP para permitir la alineación entre la aguja y el haz láser.
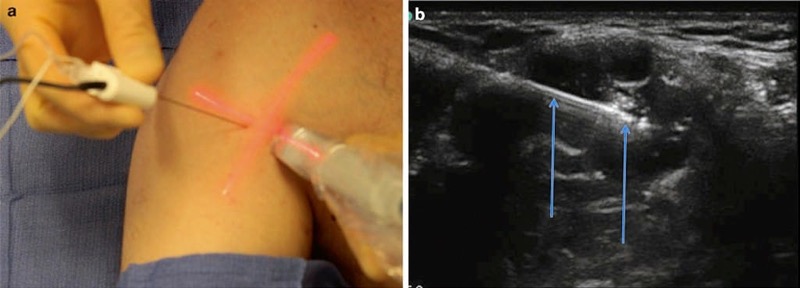
Fig. 30 Guía de aguja óptica (a, b). El dispositivo Tsui mejora la visualización de la aguja mejorando la alineación. El panel (a) muestra el dispositivo Tsui delimitando claramente el ángulo de entrada y las agujas en relación con la sonda con el haz de luz (rojo). El panel (b) muestra la inserción de la aguja (flechas) bajo la guía de la guía óptica.
22. SISTEMAS DE POSICIONAMIENTO DE AGUJA DE PROCEDIMIENTO AVANZADO
La mayoría de los profesionales experimentados que utilizan ultrasonido prefieren realizar la UGIP mediante técnicas a mano alzada, en las que pueden manipular libremente el transductor de ultrasonido con una mano y la aguja con la otra. Esta técnica ofrece flexibilidad para posicionar la aguja durante su colocación y avance hacia la(s) estructura(s) objetivo. Incluso para un profesional experimentado, a veces puede resultar difícil mantener la aguja y la estructura objetivo a la vista, evitando al mismo tiempo diversos tejidos, vasos sanguíneos y nervios.
Una posible solución para mejorar la guía del profesional sobre la predicción de la trayectoria de la aguja en un procedimiento quirúrgico es un sistema de posicionamiento avanzado que utiliza sistemas de seguimiento óptico o electromagnético. Este sistema de seguimiento en particular emplea un sensor acoplado a una sonda de ultrasonido y otro sensor acoplado al conector de la aguja. Este dispositivo utiliza un sistema de seguimiento electromagnético y realiza cálculos que permiten predecir la trayectoria de la aguja, la cual se extrapola y se muestra en pantalla como una estimación de la trayectoria prevista.
Los desarrollos iniciales para el sistema de seguimiento electromagnético se describieron como unidades separadas que fueron diseñadas para adquirir imágenes de ultrasonido de máquinas de ultrasonido convencionales que tienen un puerto de salida. Este tipo de sistema de posicionamiento recrearía las imágenes ecográficas obtenidas de la máquina de ultrasonido y combinaría esta imagen real con la trayectoria de la aguja prevista en la pantalla separada. La última tecnología permite incorporar sistemas de posicionamiento avanzados en las máquinas de ultrasonido actuales (Fig. 31La mayoría de los fabricantes de equipos de ecografía están desarrollando activamente este tipo de tecnología para procedimientos de posicionamiento avanzado que se utilizarán en UGIP para sistemas 2D, 3D y 4D. Las ablaciones por radiofrecuencia combinadas de ecografía y tomografía computarizada o ecografía y resonancia magnética, junto con otras intervenciones para el tratamiento del dolor, podrían emplear sistemas avanzados de posicionamiento de herramientas intervencionistas en un futuro próximo.
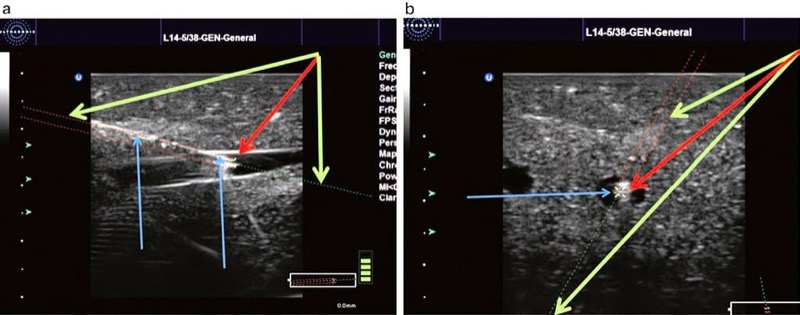
Fig. 31 Sistemas avanzados de posicionamiento por ultrasonido (US) (a, b). Los sistemas de posicionamiento avanzado de EE. UU. utilizan tecnologías de seguimiento óptico o electromagnético que calculan la proyección de la aguja, que luego se muestra como una predicción de la trayectoria futura de la aguja en la pantalla. El panel (a) muestra la aguja en un enfoque en plano oblicuo (flecha azul + flecha verde) y extrapola la dirección de la aguja mostrada por la línea verde punteada. La punta de la aguja está marcada por la flecha roja del dispositivo. El panel (b) muestra la aguja en un enfoque fuera del plano y nuevamente extrapola la dirección de la aguja (flecha azul) mostrada por una línea verde punteada (flecha verde). Nuevamente, la punta de la aguja está marcada por el dispositivo (flecha roja). Ultrasonido GPS, usado con permiso de Ultrasonix. fantasma azul.
23. EL “ARTE” DE ESCANEAR PARA UNA MEJOR VISUALIZACIÓN DE LA AGUJA DEL PROCEDIMIENTO
Los avances en los sistemas de posicionamiento de agujas que permiten que UGIP se vuelva más eficiente, interactivo, seguro y objetivo, de modo que probablemente compense algunas de las dificultades y deficiencias actuales en el aprendizaje de UGIP, continuarán desarrollándose. Sin embargo, es poco probable que dicho sistema de posicionamiento reemplace las habilidades de alineación del transductor de aguja que se practican actualmente, ya que seguirán siendo una parte integral del rendimiento de UGIP. Marhofer y Chan describieron varios movimientos del transductor de ultrasonido que pueden mejorar la visualización de la punta de la aguja del procedimiento y enfatizan que dichos movimientos del transductor y la aguja deben ser deliberados y lentos. Marhofer y Chan enfatizan además que el médico mueve o manipula solo una parte del sistema a la vez (es decir, solo mueve el transductor de ultrasonido o la aguja para optimizar la visualización de la punta de la aguja del procedimiento). Estos movimientos lentos y deliberados deben mantenerse separados o independientes entre sí (mover la aguja o la sonda) para minimizar los pasos o maniobras de reposicionamiento (deslizamiento, inclinación, rotación de la sonda) que pueden prolongar el rendimiento de la UGIP. El capítulo continúa describiendo el "ART" de las técnicas de exploración por ultrasonido como una herramienta útil para los movimientos efectivos del transductor de ultrasonido donde (1) el deslizamiento se denomina alineación (A), ya sea en el plano o fuera del plano a medida que el transductor se desliza sobre la piel. superficie, (2) rotación (R) se refiere al movimiento en sentido horario y antihorario del transductor de ultrasonido, y (3) inclinación (T) se refiere a la inclinación del transductor para maximizar la señal del haz de ultrasonido para mantener lo mejor posible un ángulo de incidencia a 90° (Figura 32).
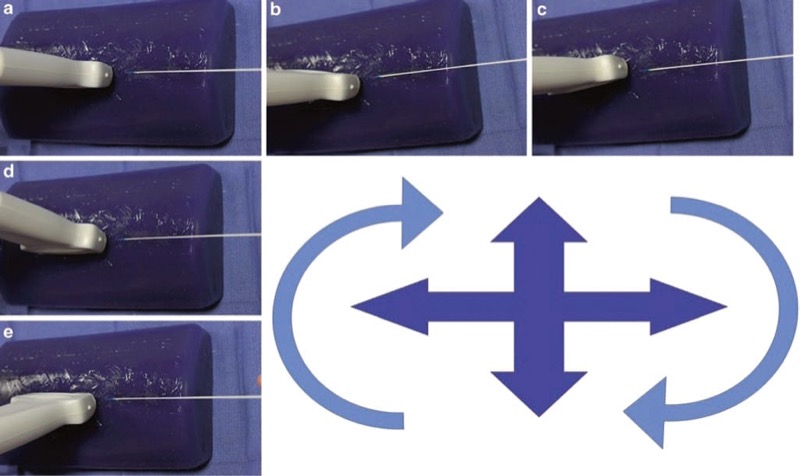
Fig. 32 Alineación de la sonda y la aguja mediante rotación, deslizamiento e inclinación. La alineación de la sonda y la aguja por rotación, deslizamiento e inclinación son factores importantes en la visualización exitosa de la aguja. El panel (a) muestra la sonda y la aguja alineadas en la técnica en el plano. Los paneles (b) y (c) giran la sonda en sentido horario y antihorario. Los paneles (d) y (e) inclinan la sonda hacia adelante y hacia atrás. fantasma azul.
24. ERGONOMÍA PARA UNA MEJOR VISIBILIDAD DE LA AGUJA DEL PROCEDIMIENTO
Se observó que el movimiento involuntario o no deliberado de la sonda de ultrasonido era el segundo error más común cometido por los residentes durante los procedimientos de anestesia regional y UGIP. Una imagen ecográfica satisfactoria de las estructuras objetivo (p. ej., nervio) y la aguja del procedimiento podía perderse fácil y rápidamente incluso con manipulaciones menores (deslizamientos) de la sonda de ultrasonido, la cual se había preparado (colocada en gel de ultrasonido) para la anestesia regional y UGIP. Estos movimientos aparentemente menores de la sonda de ultrasonido, causados comúnmente al intentar alcanzar los suministros o por una ergonomía deficiente, por ejemplo, son errores que deben considerarse para evitar prolongar la realización del procedimiento UGIP. Sites et al. demostraron que los profesionales novatos cometían errores (aproximadamente el 10 %) que comprendían una ergonomía deficiente y fatiga del operador. La fatiga del operador durante UGIP se manifestaba típicamente como la necesidad de cambiar de mano para sostener la sonda de ultrasonido durante el procedimiento, la necesidad de usar ambas manos en la sonda y temblores en las manos. Estos problemas de fatiga y los movimientos menores de la sonda de ultrasonido pueden comprometer aún más la visualización de la aguja del procedimiento, así como la eficiencia y el éxito de UGIP.
Para superar algunos problemas que comprometen el éxito de la UGIP, se debe manipular la sonda de ultrasonido y se deben tomar medidas para estabilizar adecuadamente el posicionamiento de la sonda de ultrasonido y, al mismo tiempo, tomar medidas para minimizar la fatiga del operador. Para mejorar las técnicas de estabilización de la sonda de ultrasonido, el operador debe usar técnicas de manos libres durante los procedimientos UGIP. Las técnicas de mano alzada se realizan haciendo que la mano del transductor de ultrasonido del operador funcione como estabilizador del transductor de ultrasonido y para localizar y mantener la estructura objetivo en la pantalla de imagen de ultrasonido. El médico también puede considerar usar los dedos en reposo de la mano utilizada para sostener la sonda de ultrasonido para aplicar presión hacia abajo, lo que puede minimizar el movimiento de la sonda y reducir la fatiga del operador (Figura 33). La técnica de manos libres también puede disminuir el deslizamiento de la sonda de ultrasonido sobre la superficie de la piel cubierta de gel.
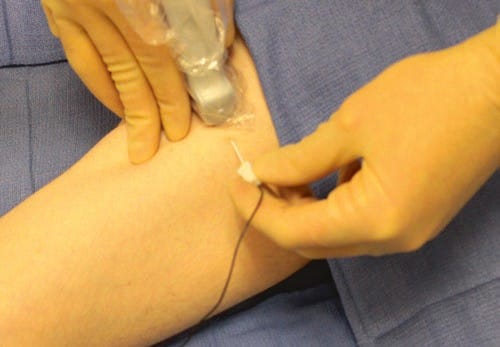
Fig. 33 Técnica a mano alzada. Las técnicas de mano alzada se realizan haciendo que la mano del transductor de ultrasonido del operador funcione como estabilizador del transductor de ultrasonido y para localizar y mantener la estructura objetivo en la pantalla de imagen de ultrasonido. El médico también puede considerar usar los dedos en reposo de la mano utilizada para sostener la sonda de ultrasonido para aplicar presión hacia abajo, lo que puede minimizar el movimiento de la sonda y reducir la fatiga del operador. La técnica también puede disminuir el deslizamiento de la sonda de ultrasonido sobre la superficie de la piel cubierta de gel.
Al realizar procedimientos UGIP, siempre es útil realizar una ecografía previa al procedimiento de las estructuras objetivo y el área de tejido circundante y luego marcar o identificar (en la piel del paciente) la posición óptima de la sonda delineando la huella de la sonda de ultrasonido colocada donde la imagen objetivo más ideal es la mejor. visualizado. Esta medida rápida, fácil y beneficiosa puede minimizar o evitar movimientos excesivos de la aguja y la sonda de ultrasonido durante la intervención de la UGIP, lo que podría traducirse en procedimientos de UGIP ineficientes y lentos, así como en posibles daños estructurales no intencionales (Figura 34). Para optimizar aún más la visualización de la aguja de procedimiento por ultrasonido y disminuir la fatiga del operador, se deben tomar medidas simples para mejorar la ergonomía del profesional. Algunas medidas simples para mejorar la ergonomía del operador son preparar todos los suministros necesarios antes de que la sonda de ultrasonido se prepare y se coloque en una vaina estéril, así como elevar la altura de la cama del paciente para mantener una postura adecuada del operador. Para mejorar aún más la alineación de la aguja de procedimiento y la sonda de ultrasonido, además de disminuir la fatiga del operador, existen carros especiales diseñados para UGIP, geles adhesivos para ultrasonido y brazos mecánicos estabilizadores para minimizar los movimientos del transductor de ultrasonido (Figura 34).

Fig. 34 Marcaje de la piel. El marcado del sitio de la piel del paciente permite al operador mejorar la alineación. Esto es especialmente cierto en casos de movimiento del paciente o pérdida de la alineación anterior de la aguja de la sonda.
25. MEJORA Y TÉCNICAS PARA MEJORAR LA LOCALIZACIÓN DE LA AGUJA DEL PROCEDIMIENTO
Efecto ecográfico básico de realce
El realce es la descripción de lo que ocurre y lo que se ve en una imagen de ultrasonido cuando el tejido con baja impedancia acústica, como la sangre dentro de una estructura vascular, realza la pared del vaso que lo contiene como una señal de ultrasonido que lo hace parecer hiperecogénico. De manera similar, el concepto de mejora también puede mejorar la visualización de una aguja de procedimiento dentro de una estructura vascular o ciertos tejidos (por ejemplo, grasa) que tienen una impedancia acústica más baja en comparación con la aguja (Figura 35).
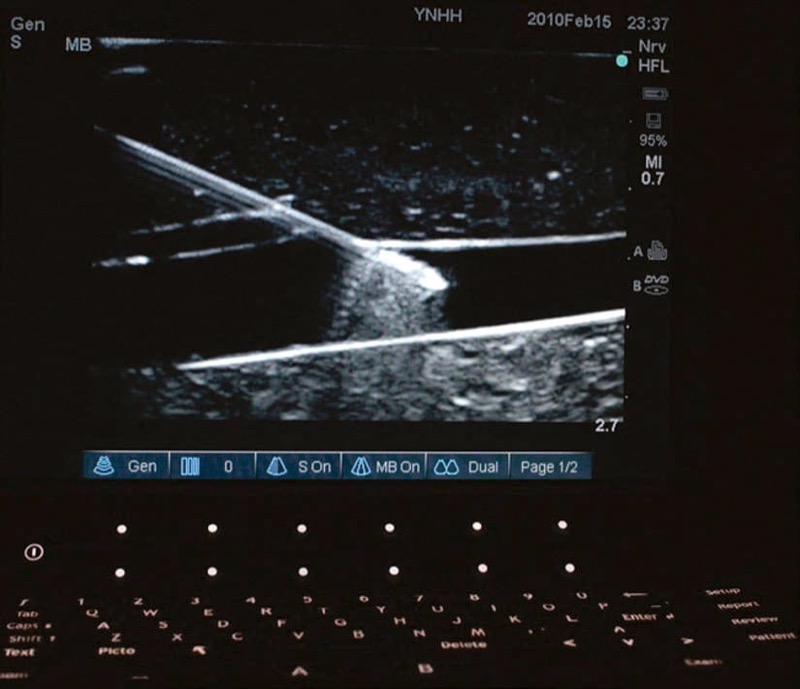
Fig. 35 Realce de aguja. El realce de la aguja dentro de la pared del vaso se produce debido a una mayor diferencia en la impedancia acústica entre la aguja y el fluido del vaso. El eje de la aguja en el sitio de entrada en la pared del vaso no resalta tan brillantemente como la punta dentro de la pared del vaso.
La comprensión y aplicación del concepto de mejora de la imagen podría resultar útil en situaciones donde la localización y el seguimiento de la aguja durante los procedimientos de UGIP sean difíciles. A pesar del uso de agujas ecogénicas y tecnología ecográfica avanzada, junto con la manipulación experta de la aguja y la sonda de ultrasonido, realizar UGIP en todas las situaciones podría no ser suficiente para lograr el éxito de la intervención propuesta. La aplicación de la estrategia de mejora de la imagen y otras técnicas descritas a continuación podría ser beneficiosa para resaltar la localización de la aguja mediante ultrasonido.
26. MEJORA CON IMPRIMACIÓN, INSERCIÓN DE ESTILETE O ALAMBRE GUÍA Y VIBRACIÓN
En ocasiones, la aguja del procedimiento puede resultar difícil de visualizar a pesar de la correcta alineación y posicionamiento de la aguja y el transductor de ultrasonido. En algunas de estas situaciones, donde la visualización de la aguja es difícil, se puede localizar simplemente moviendo la aguja completa (o un estilete/guía colocado en su interior). Chapman et al. describen el movimiento de la aguja insertada mediante movimientos cortos de lado a lado y de entrada y salida, que desvían los tejidos adyacentes y pueden mejorar la visualización de su trayectoria. Sin embargo, el movimiento de la aguja completa puede causar molestias adicionales al paciente y provocar daños estructurales involuntarios en los tejidos si no se visualiza la punta.
Cuando la exploración ecográfica continua de la inserción y el paso de la aguja del procedimiento hacia una estructura objetivo no tiene éxito, la punta de la aguja se puede localizar insertando un pequeño alambre guía o estilete a través de la aguja hasta la punta de la aguja. Chapman et al. describen que el cebado de una aguja de procedimiento mediante la inmersión de la aguja en agua estéril puede causar una mejora de la aguja durante la exploración ecográfica. Otra técnica que se puede utilizar es con la función Doppler del ecógrafo para detectar vibraciones de la aguja del procedimiento. Con la función Doppler de flujo de color del dispositivo de ultrasonido activada, se inserta un estilete ligeramente doblado en la aguja del procedimiento y luego se rota causando una vibración lateral de la aguja. Esta vibración de la aguja es detectada y visualizada por el Doppler de flujo de color y puede ayudar a mejorar la visibilidad de la aguja del procedimiento en la pantalla de ultrasonido en tiempo real (Figura 36Actualmente, existen dispositivos disponibles comercialmente que utilizan este principio de vibración de la aguja para mejorar su visibilidad. Esta tecnología consiste en acoplar un pequeño dispositivo al vástago de la aguja que, al activarse, produce pequeñas vibraciones en la punta (con una amplitud máxima de 15 mm, imperceptibles al tacto) que generan una señal mediante Doppler color.
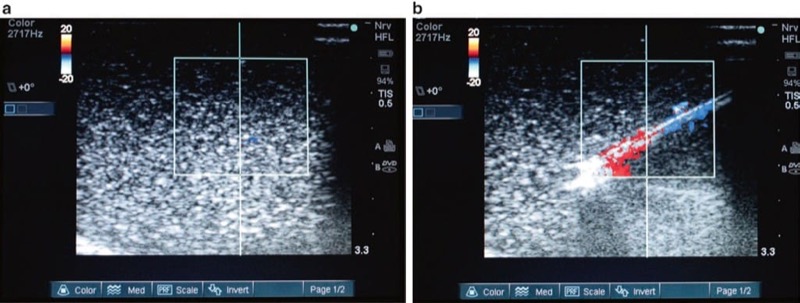
Fig. 36 Visualización mejorada de la aguja de procedimiento bajo ultrasonido Doppler (a, b). La aplicación de vibración a la aguja con un estilete insertado y movido provocará un ligero movimiento de la aguja y mejorará la visualización bajo la ecografía Doppler. El panel (a) muestra la aguja bajo ultrasonido sin vibración. El panel (b) muestra la señal Doppler color con el movimiento del estilete de la aguja.
Otro método que podría mejorar la visualización de la aguja durante el procedimiento (mediante Doppler) consiste en aplicar vibraciones al tejido circundante a la estructura objetivo, en lugar de a la aguja misma. Al activar la opción Doppler de flujo de color, la sonda o transductor de ultrasonido vibra a diferentes frecuencias. Posteriormente, se mide la intensidad de la vibración tisular producida por la sonda en cada frecuencia mediante un algoritmo Doppler de potencia cuantitativo integrado en el ecógrafo. Esta técnica avanzada de imagen por ultrasonido podría contribuir a una mejor localización de la aguja y podría tener aplicaciones en diversos procedimientos e intervenciones para el tratamiento del dolor.
27. HIDROLOCALIZACIÓN DE LA AGUJA DE PROCEDIMIENTO
Hay varios estudios que describen la inyección de una pequeña cantidad de líquido (0.5–1 ml) a través de la aguja para ayudar a confirmar la ubicación o posición de la punta de la aguja del procedimiento. Esta maniobra generalmente se realiza moviendo primero la aguja del procedimiento insertada y observando el movimiento del tejido circundante y luego mediante la inyección de líquido mientras se busca la aparición de una pequeña bolsa hipoecoica o anecoica en el sitio de la punta de la aguja creada por el líquido inyectado. Hidrolocalización es el término o nombre dado a esta maniobra por Bloc et al. Se puede realizar con agua estéril, solución salina normal, una inyección de anestésico local o dextrosa al 5% (Figura 37El uso de una solución de dextrosa al 5%, para preservar la función y la respuesta motora, es lo más óptimo para las técnicas combinadas de estimulación nerviosa guiadas por ultrasonido durante la realización de bloqueos de nervios periféricos.
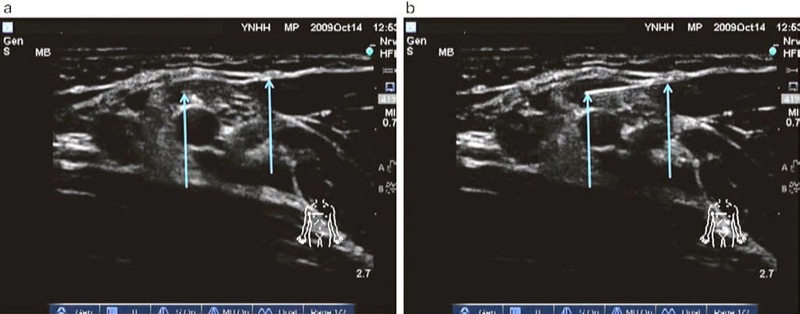
Fig. 37 Técnica de hidrolocalización (a, b). La hidrolocalización se lleva a cabo inyectando el líquido que puede mejorar la visualización de la punta de la aguja formando primero una bolsa anecoica que luego realza la punta de la aguja. El panel (a) demostró que la punta de la aguja de procedimiento (flecha derecha) (flecha izquierda) es difícil de visualizar. La inyección de líquido, que se muestra en el panel (b), hizo que la punta (flecha izquierda) de la aguja de procedimiento (flecha derecha) se localizara fácilmente.
28. VISIBILIDAD DE LA AGUJA DEL PROCEDIMIENTO MEDIANTE SOLUCIONES AGITADAS O CON AGENTES DE CONTRASTE ULTRASONIDOS
De forma similar a la hidrolocalización descrita anteriormente, la inyección de microburbujas utiliza un pequeño bolo de solución salina agitada que se coloca a través de la aguja del procedimiento. Esta técnica puede ayudar a la visibilidad de la punta de la aguja guiada por ultrasonido y podría mejorar aún más la visualización y localización tanto de la aguja del procedimiento como del catéter enhebrado (Figura 38Las microburbujas pueden potenciar la visualización de la aguja aprovechando la diferencia de impedancia acústica entre las microburbujas inyectadas y los tejidos circundantes. Sin embargo, la técnica de inyección de microburbujas ha recibido algunas críticas en la práctica de la UGIP, ya que presenta la desventaja potencial de crear una sombra acústica y, potencialmente, oscurecer la imagen de las estructuras objetivo.
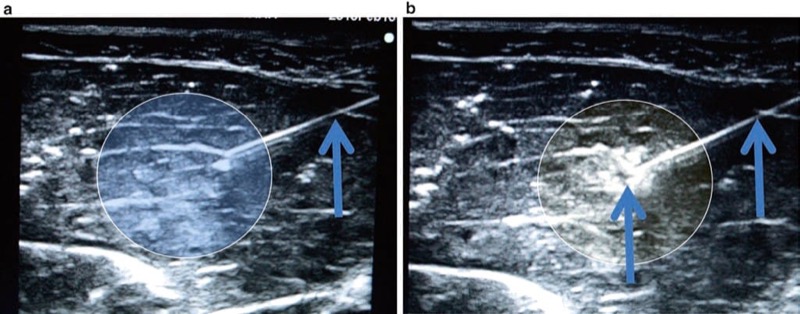
Fig. 38 Técnica de inyección de microburbujas (a, b). La técnica de inyección de microburbujas utiliza un pequeño bolo de solución salina agitada que se inyecta a través de la punta de la aguja y puede mejorar aún más la visualización y localización de la aguja. El panel (a) muestra la aguja antes de la inyección. El panel (b) muestra la punta de la aguja y el área circundante después de la inyección de las microburbujas. Las microburbujas pueden interrumpir la visualización de la estructura en lo profundo de las microburbujas que se ven en el panel (b). Fantasma porcino.
Las microburbujas representan una de las variedades de medios de contraste para ultrasonido. Los agentes de contraste prefabricados están disponibles en el mercado y suelen emplear nanopartículas lipídicas encapsuladas o micelas poliméricas. Estos agentes de contraste inyectables pueden aumentar significativamente la cantidad de imágenes de retrodispersión de ultrasonido, lo que puede mejorar la visibilidad de la aguja durante el procedimiento bajo ultrasonido convencional o Doppler color. Las desventajas de la inyección de agentes de contraste son su costo, ya que son caros y requieren una inyección intravenosa adicional. No existen estudios que describan el uso de estos agentes de contraste para mejorar la visualización de la aguja en anestesia regional o medicina del dolor, pero podrían ser potencialmente útiles si se emplean en procedimientos UGIP. Se entiende que, si se desarrolla la tecnología de contraste de ultrasonido, esta técnica podría convertirse en un complemento o herramienta útil para mejorar la visualización de la punta de la aguja durante el procedimiento.
29. LOCALIZACIÓN DE LA PUNTA DE LA AGUJA DEL PROCEDIMIENTO CON LA AYUDA DE LA ESTIMULACIÓN NERVIOSA
Se sabe que a veces puede ser difícil determinar la proximidad de la punta de la aguja del procedimiento en relación con las estructuras nerviosas objetivo en la pantalla de ultrasonido. Tsui et al. informaron que la estimulación nerviosa puede utilizarse para ayudar en los entornos de entrenamiento de UGIP y para ayudar a verificar la posición de la punta de la aguja en relación con las estructuras nerviosas. Chantzi et al. han confirmado que la técnica combinada que utiliza tanto ultrasonido como estimulación nerviosa percutánea puede servir como un método confiable para verificar la ubicación de la punta de la aguja del procedimiento. Las técnicas combinadas de ultrasonido y estimulación nerviosa por residentes de anestesia y profesionales que no tienen experiencia en procedimientos guiados por ultrasonido o que tienen poca experiencia en ultrasonido pueden mejorar sus habilidades al intentar identificar estructuras nerviosas en situaciones de dificultad para localizar la punta de la aguja. Se ha demostrado que UGIP combinado con estimulación nerviosa aumenta la tasa de éxito de las intervenciones para el manejo del dolor.
Además, dado que las agujas utilizadas durante las técnicas de estimulación nerviosa están recubiertas de polímero, son ecogénicas por definición y resultan atractivas para su uso en procedimientos UGIP. Una de las desventajas de esta técnica es que, al combinar UGIP y estimulación nerviosa, requiere la disponibilidad de un ecógrafo y el equipo necesario para la neuroestimulación, los cuales deben estar disponibles en el campo estéril. Otra posible desventaja de la técnica combinada es que los controles de estimulación nerviosa y la pantalla de imagen ecográfica se encuentran en dos paneles de visualización separados (ecógrafo y neuroestimulador), lo que podría dificultar la visualización y la calibración simultánea en dos dispositivos individuales. Los procesos necesarios para configurar y modificar los controles de ajuste del dispositivo podrían provocar movimientos involuntarios de la aguja o la sonda ecográfica. Una posible solución a este problema sería un ecógrafo que también pudiera incorporar la mecánica de un neuroestimulador. Por lo tanto, al estimular las agujas y los catéteres perineurales para confirmar la ubicación anatómica y la proximidad a los sitios objetivo durante las técnicas de bloqueo nervioso, se obtendrían los beneficios adicionales de la ecografía complementaria y la estimulación nerviosa, que podrían controlarse simultáneamente. Además, cuando tanto la aguja como el objetivo se visualizan adecuadamente, la estimulación nerviosa como complemento de la guía ecográfica puede tener un papel limitado, ya que una respuesta motora positiva a la estimulación nerviosa no aumenta la tasa de éxito del bloqueo. Asimismo, la estimulación nerviosa combinada con la ecografía tiene una alta tasa de falsos negativos, lo que sugiere que estos bloqueos suelen ser efectivos, incluso en ausencia de respuesta motora. Los posibles problemas con la neuroestimulación adecuada cuando se utiliza junto con la ecografía intraperitoneal guiada por ultrasonido podrían estar relacionados con el gel de ultrasonido. Cuando se utilizó dextrosa al 5%, como medio no conductor, no afectó la conducción eléctrica durante la estimulación eléctrica. Por lo tanto, es importante evitar el uso de solución salina o gel como medio de ultrasonido, ya que puede dificultar cualquier intento posterior de estimular eléctricamente el nervio.
30. RESUMEN
Para visualizar inequívocamente la aguja de procedimiento bajo el ultrasonido y manipular la aguja de manera efectiva, se debe adquirir un nuevo conjunto de habilidades. Estas habilidades son los activos críticos que probablemente nunca serán sustituidos por tecnología de ultrasonido avanzada y agujas de procedimiento mejoradas. Las técnicas discutidas en este capítulo intentan ayudar a mejorar la visualización de la aguja durante la UGIP. Deben usarse en combinación, dependiendo de la naturaleza y localización del procedimiento.